Automatizované rovery sú pokročilá, no zároveň vzrušujúca technológia na spoznávanie našich susedných planét. Postaviť rover pre Mars môže byť náročná úloha pre každý tím, najmä v čase globálnych neistôt, ako bola pandémia. Od problémov v dodávateľských reťazcoch a oneskorených dodávok až po obmedzenú komunikáciu a reštrikcie osobných stretnutí tímov – tím DJS Antariksh dokázal, že dokáže vytvoriť veľmi úspešný Mars Rover aj napriek akýmkoľvek výzvam! Ak vás zaujala European Mars Rover Challenge alebo máte vášeň pre autonómne rovery, tento článok je pre vás! Priblížime cestu tímu DJS Antariksh, ako oživili svoj Mars Rover s využitím elektrických lineárnych aktuátorov pre European Mars Rover Challenge!
Predstavujeme tím DJS Antariksh

Tím DJS Antariksh tvoria bakalárski študenti z rôznych odborov strojárstva a je oficiálnym tímom Mars Rover na Dwarkadas J. Sanghvi College of Engineering v Bombaji v Indii. Aby ukázali svoju vášeň pre vesmírny a robotický priemysel, spoločne pracujú na stavbe svojho roveru a zároveň súťažia v rôznych Mars Rover Challenges.
Vo svojom debutovom roku získal tím tretie miesto na celom svete a vyhral ocenenie za najlepšie vedecké plánovanie v roku 2020. V súťaži European Rover Challenge (ERC) 2021 Remote získal DJS Antariksh 1. miesto na svete spolu s oceneniami Best Science a Best Navigation. Ich oficiálny dizajn Mars Rover – „Abhigyaan“ – získal tretie miesto v International Rover Design Challenge (IRDC) 2022 a bol víťazom 1. miesta European Rover Challenge 2022 (REMOTE formula).
Tím DJS Antariksh si kladie za cieľ pokračovať v tempe príprav na International Rover Challenge 2023. Hoci pochádzajú z jedného z miest najviac zasiahnutých pandémiou, tím DJS Antariksh naďalej rozlúšťa zdanlivo nemožné a usiluje sa o excelentnosť.
Plánovanie a návrh roveru

Krátko po tom, ako sa vytvorili členovia tímu DJS Antariksh, bol v roku 2020 celý štát tímu v lockdowne kvôli pandémii. V tom čase všetci z ich fakúlt povzbudzovali tím, aby zo seba vydali maximum a aspoň získali čo najviac skúseností a vedomostí. Hoci tím nemal žiadne predchádzajúce znalosti ani skúsenosti s prácou na marsovskom roveri, urobili čo najviac online práce – výskum, návrh, brainstorming a analýzu rizík pre svoj Mars Rover. Päť pododdelení tímu a ich úlohy sú uvedené nižšie:
- Oddelenie kódovania: pracuje na algoritmoch pre celkové operácie roveru a efektívnu detekciu objektov.
- Marketingové oddelenie: zodpovedá za celkové riadenie tímu a komunikáciu o financiách.
- Mechanické oddelenie: zabezpečuje návrh, výrobu a testovanie konštrukcie roveru.
- Oddelenie elektroniky: má na starosti vývoj a integráciu elektronických systémov roveru.
- Vedecké oddelenie: pripravuje hypotézy, ktoré možno testovať na mieste pristátia štúdiom geologickej histórie Marsu.
Tím sa tiež zúčastnil toľkých virtuálnych Mars Rover Challenges, koľko len mohol, kým bol ich projekt ešte vo vývoji. Pozrite si celé video od tímu DJS Antariksh nižšie:
Ideálna tímová interakcia a podstata osobných stretnutí neboli možné, keďže počas pandémie sa mohlo stretávať iba online. Pandémia zasiahla mnoho organizácií, čo viedlo k nedostatku dodávok a k zdržaniam dostupnosti komponentov. Tím však urobil maximum v online prostredí a zároveň zbieral prostriedky na projekt, pričom svoje prvé komponenty sa im podarilo získať po 1,5 roku.
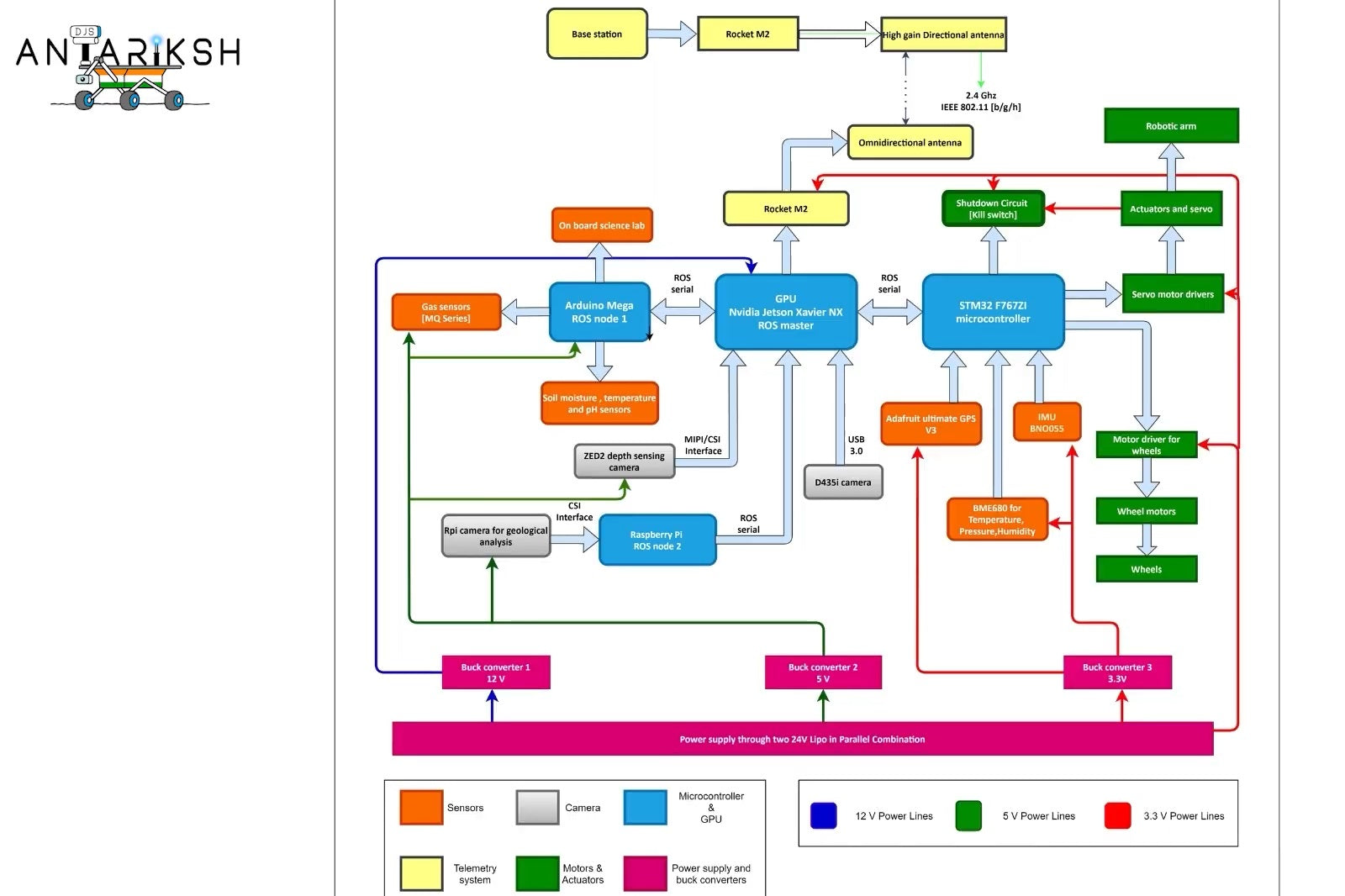
Pomocou softvéru ako HiRISE a JMARS tím zbieral údaje o geologických črtách Marsu na prípravu vedeckej misie. Všetko – od základných podsystémov až po zložité podsystémy v ich robotickom ramene – navrhol a následne od základu postavil samotný tím. Softvér Proteus Design Suite sa použil na simuláciu všetkých obvodov, zatiaľ čo robustnú dosku plošných spojov na priemyselnej úrovni navrhli v nástroji Altium Designer.

Výroba marsovského roveru

Po uvoľnení pandemických obmedzení v ich štáte sa tím konečne mohol stretnúť osobne na offline úlohy, ako sú navrhovanie, plánovanie a výroba ich Mars Rovera. Počas pandémie a v raných fázach plánovania boli niektoré aspekty ich roveru navrhnuté s využitím technológií, ktoré sa neskôr ukázali ako nedostupné na nákup. Kvôli obmedzenej dostupnosti a dodacím lehotám niektorých komponentov musel tím strategicky naplánovať, ktoré diely objedná v polovici roka 2021.

Pri finalizácii novších komponentov, ktoré sa mali použiť na Mars Roveri, bolo potrebné uistiť sa, že sú na trhu dostupné, aby ich tím mohol zakúpiť a pracovať s nimi. Výsledkom bolo, že výrobný proces Mars Rovera sa posunul na koniec roku 2021 a začiatok roku 2022, keď už mal tím pripravené plány na zdroje, s ktorými môže pracovať. V niektorých prípadoch musel tím niektoré podsystémy prepracovať a za pochodu improvizovať, aby splnili požiadavky kompatibility s komponentmi, ktoré sa podarilo získať. Tím spočiatku začal s pomalšou výrobou, keďže išlo o ich prvú skúsenosť s výrobou a mali k dispozícii len veľmi obmedzené technológie a financie.

Tím sa uistil, že projekt ide správnym smerom, prostredníctvom diskusií so svojimi fakultami, staršími členmi a odborníkmi z praxe, aby potvrdili, že všetko zakúpené a obrábané pre ich diely bude vhodné na dosiahnutie cieľov. Po viacerých rozhovoroch s odborníkmi sa tímu podarilo znížiť možné zdržania v nasledujúcom roku. Podpora partnerstiev a sponzorov zohrala kľúčovú úlohu v projekte aj jeho financovaní. Nerezové spojovacie prvky od Sunrise Multi Tech Fasteners Pvt. Ltd. a dielenské náradie od Samsan Tools použil tím na stavbu svojho Mars Rovera. Tím tiež získal svoju zákazkovú dosku plošných spojov od PCB Power Market India.

Pozrite si video nižšie a zistite viac o práci na diaľku pri robotických projektoch:
Využitie lineárnych aktuátorov v súťaži Mars Rover Challenge

Naše PA-14P-8-150 a PA-14P-4-150 elektrické lineárne aktuátory poháňajú robotické rameno roveru, aby mal šesť stupňov voľnosti (6DOF). Integráciou našich lineárnych aktuátorov PA-14P so spätnou väzbou možno informácie o polohe čítať prostredníctvom signálov spätnej väzby z integrovaných potenciometrov aktuátora. Mať informácie o polohe umožňuje systému určiť, či aktuátory dosiahli požadované polohy, čo minimalizuje chyby a umožňuje vysokú presnosť. Okrem toho mali tieto aktuátory poháňané elektromotorom aj kompaktné rozmery a ľahkú konštrukciu, aby pomohli udržať nízku celkovú hmotnosť roveru pre Mars.

„Manipulátor roveru je 6DOF robotické rameno vybavené dvojprstovým uchopovačom. Rameno pozostáva z dvoch lineárnych a štyroch rotačných aktuátorov umiestnených tak, aby poskytovali lepšie rozloženie zaťaženia a vyššiu efektivitu. Dvojprstový uchopovač je založený na motore, ktorý napája a riadi kinematickú zostavu uchopovača a pohyb čeľustí.“ - Rutwik Bhangale
Ak chcete vidieť ďalšie videá od DJS Antariksh, pozrite si ich YouTube kanál a najnovší upload nižšie:
ZHRNUTIE
Vďaka spolupráci v tíme, vytrvalosti a neochvejnej oddanosti prekonal tím DJS Antariksh každú výzvu, ktorej čelil, a oživil veľmi úspešný Mars Rover. Ak chcete viac noviniek o tíme DJS Antariksh a ich budúcich výzvach s Mars Roverom, sledujte ich na Instagrame, Facebooku, Twitteri a LinkedIne!
Ďakujeme tímu DJS Antariksh za zdieľanie projektu a inšpiráciu pre všetkých! Prajeme vám veľa úspechov v súťaži International Rover Challenge 2023!
Ak máte vlastné projekty, aplikácie alebo technické otázky k našim elektrickým lineárnym aktuátorom, kedykoľvek nás kontaktujte. Sme odborníci v tom, čo robíme, a radi vám pomôžeme s budúcimi zákazkovými projektmi!
sales@progressiveautomations.com | 1-800-676-6123