




Der PA-18 Track Linear Actuator ist unser größter Aktuator mit fester Länge und wird häufig in maßgefertigten Möbeln, Hausautomation und Robotik eingesetzt. Sie können einen Aktuator ganz einfach mit einem Arduino-Board steuern, und dieser Artikel zeigt Ihnen, wie Sie einen Arduino-gesteuerten linearen Aktuator bauen und programmieren, der leicht an Ihre Anwendung angepasst werden kann!
Erforderliche Hardware
Die folgenden Hardwareteile werden für einen Arduino-gesteuerten linearen Aktuator benötigt, die alle bei Progressive Automations erworben werden können:
- 1x PA-18 Track Linear Actuator
- 1x Arduino Uno
- 1x MegaMoto Plus H-Brücke
- 1x 12VDC-Netzteil
- 2x Momentary-Taster
- Jumper-Kabel
Systemverkabelung
Der in diesem Setup verwendete Aktuator benötigt eine Eingangsspannung von 12VDC und bis zu 8A Strom bei voller Last. Diese Werte sind viel höher als das, was ein Arduino-Mikrocontroller liefern kann, und werden dazu führen, dass „magischer“ Rauch aus dem Arduino kommt. Um den Arduino nicht zu beschädigen, wird die MegaMoto Plus H-Brücke verwendet. Die H-Brücke kann die Leistungsanforderungen bewältigen und kann leicht verwendet werden, um einen Aktuator mit einem Arduino zu steuern.
Für dieses System gibt es Verbindungen vom Arduino zur MegaMoto Plus H-Brücke und zu den beiden Tastern. Jeder Taster benötigt einen einzelnen Eingang, der aus den verfügbaren GPIO-Pins des Arduino ausgewählt wird. Die H-Brücke hat vier Verbindungen zum Arduino, drei Ausgänge und einen Eingang. Die von der H-Brücke verwendeten Pins sind voreingestellt und können nicht geändert werden.
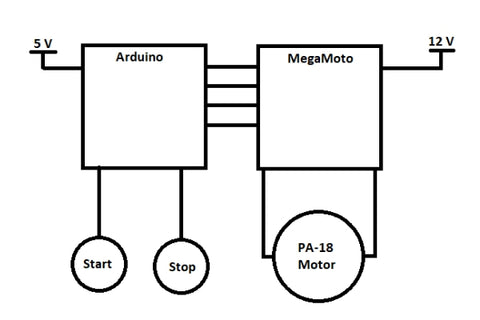
Blockdiagramm
Das folgende Blockdiagramm erklärt kurz die Leistungsanforderungen und Verbindungen. Der Arduino läuft mit einer 5V-Stromversorgung und die H-Brücke läuft mit 12V. Wenn Sie zwei separate Stromversorgungen verwenden, ist es wichtig, dass ihre Erdungen geteilt werden, um ein Szenario mit schwimmendem Erdung zu vermeiden.
Arduino-Befehle
Sie müssen die Arduino IDE auf einem Desktop-Computer oder Laptop installieren. Beachten Sie, dass die Verkabelung Ihres Systems Ihren Arduino-Code beeinflusst. Daher ist es wichtig, Ihre Verbindungen zu überprüfen und mit dem eingegebenen Code zu vergleichen.
Der Befehl pinMode von Arduino wird verwendet, um die Pins als Eingänge oder Ausgänge zu definieren. Um das Signal zu ändern, das der Arduino an einen bestimmten Pin sendet, werden die Befehle digitalWrite und analogWrite verwendet. Darüber hinaus werden die Befehle digitalRead und analogRead verwendet, wenn der Arduino das Signal an einem bestimmten Pin überprüfen muss.
Im folgenden Programm wird der Befehl digitalWrite verwendet, um die H-Brücke zu aktivieren oder zu deaktivieren und um die für die Taster verwendeten Pins zu konfigurieren. Der Befehl analogWrite wird verwendet, um den Wert für das PWM-Signal im Bereich von 0 bis 255 für die H-Brücke festzulegen. Der Befehl digitalRead wird verwendet, um zu überprüfen, ob die Taster gedrückt oder losgelassen wurden. Der Befehl analogRead wird verwendet, um den Stromverbrauch des Aktuatorenmotors zu messen, was überprüft, wann der Aktuator am Ende seiner Hublänge ist.
Arduino-Code
Der folgende Abschnitt erläutert die Programmdefinitionen, das Setup, die Hauptschleife und die Tasterfunktionen für einen Arduino-gesteuerten linearen Aktuator. Es ist wichtig, den Code Zeile für Zeile durchzugehen, um zu verstehen, wie er funktioniert. Dieses Verständnis ermöglicht es Ihnen, Anpassungen basierend auf Ihrer Anwendung vorzunehmen.
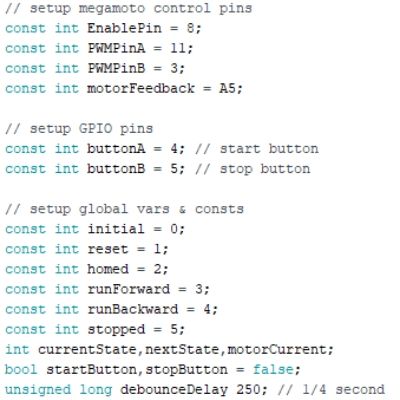
Programmdifferenzen
Dieser Abschnitt des Codes ist das Setup der Pinverbindungen. Überprüfen Sie, ob Ihre Verbindungen zur Arduino-Platine mit den eingegebenen Zahlen übereinstimmen. Diese Werte können geändert werden, je nachdem, ob Sie zusätzliche Komponenten an den Arduino anschließen, die möglicherweise eine Verschiebung der Pinverbindungen erfordern.
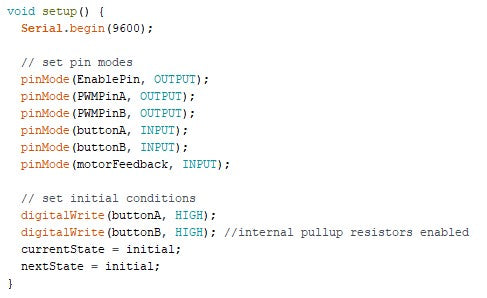
Programmier-Setup
Dieser Abschnitt des Codes konfiguriert die verbundenen Pins als Eingabe oder Ausgabe. Die beiden Taster können auf HIGH oder LOW eingestellt werden, je nachdem, wie Sie sie angeschlossen haben (Pull-Up oder Pull-Down). Obwohl der Arduino interne Pullup-Widerstände hat, möchten Sie möglicherweise einen externen Widerstand hinzufügen, um das Prellen der Schalter zu vermeiden und falsches Auslösen zu verhindern.
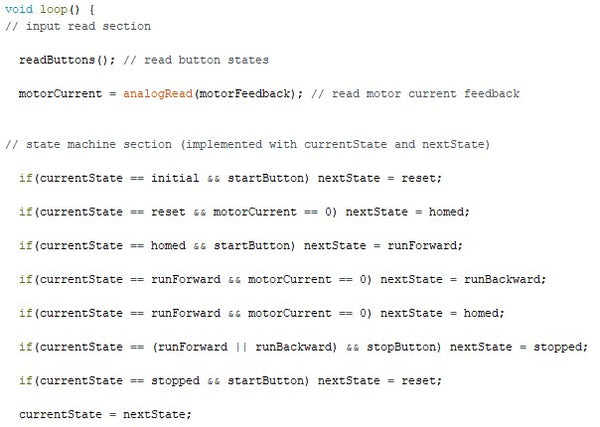
Hauptschleife
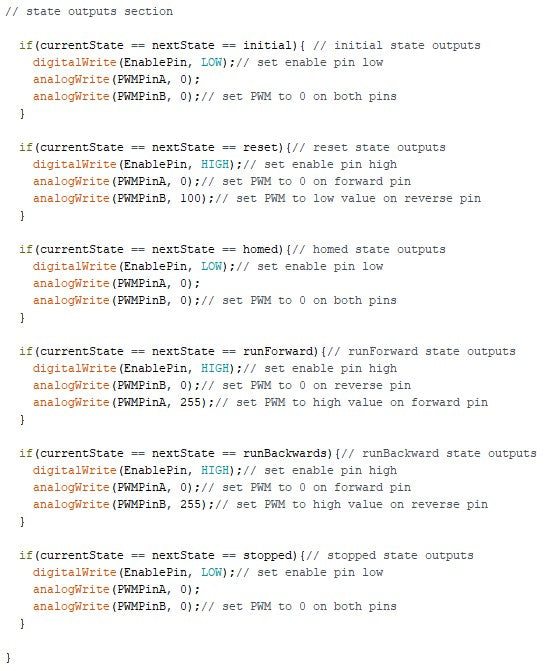
Die Hauptschleife überprüft ständig, ob die Taster gedrückt wurden, und führt einen bestimmten Abschnitt des Codes aus, abhängig vom Ergebnis der Tasterfunktion. Ein Abschnitt der Zustandsmaschine ist enthalten, um zu bestimmen, was der Arduino-gesteuerte lineare Aktuator tut und wie er basierend auf den Eingaben (d.h. den Tastern) reagieren sollte.
Tasterfunktionen
Diese Funktionen lesen digital den Zustand der Taster, um einen Aktuator mit einem Arduino zu steuern. Jede Tasterfunktion hat eine Entprellschleife innerhalb der Haupt-if-Anweisung, um Fehlzündungen zu verhindern und das falsche Signal an den Arduino zu senden. Ein boolescher Wert ist die Ausgabe dieser Funktionen. Wenn beispielsweise der Startknopf gedrückt wird, ändert sich der Wert von startButton auf true. Der boolesche Wert wird dann in der Hauptschleife verwendet, um weitere Entscheidungen zu treffen.

Letzte Worte
Die Funktionalität dieses Systems geht über das hinaus, was in diesem Artikel gezeigt wird. Der Arduino-Mikrocontroller und die MegaMoto Plus H-Brücke können verwendet werden, um viel kompliziertere Steuerungsroutinen zu implementieren. Dieses Setup ist in der Lage, die variable Geschwindigkeitsregelung zu nutzen, indem der Befehl analogWrite verwendet wird, um das PWM-Signal festzulegen. Der Stromverbrauch des Aktuatorenmotors könnte überwacht werden, um für die Lastüberwachung verwendet zu werden, um zusätzliche Befehle auszulösen.
Darüber hinaus können zusätzliche Sensoren für einen fortschrittlichen Arduino-gesteuerten linearen Aktuator angeschlossen werden. Beispielsweise kann ein Ultraschallsensor angeschlossen werden, um den Motor zu starten/stoppen, wenn Sie sich in einer bestimmten Entfernung befinden, oder er kann verwendet werden, um eine Reihe anderer interessanter Funktionen auszulösen. Die Möglichkeiten sind endlos. Wenn jedoch die Pins auf dem Arduino zur Neige gehen, können Sie ein anderes Arduino-Modell wählen. Alternativ können mehrere Arduinos in Reihe geschaltet werden, um miteinander und mit verschiedenen Komponenten zu kommunizieren. Dieser Weg erfordert jedoch eine angemessene Menge an Programmiererfahrung.
Für weitere Informationen senden Sie uns bitte eine E-Mail an sales@progressiveautomations.com oder rufen Sie uns unter 1-800-676-6123 an.