Il existe deux méthodes pour piloter plusieurs actionneurs – en parallèle et en synchronisé. Le contrôle en parallèle fournit une tension constante à chaque actionneur, tandis que le contrôle synchronisé applique une tension variable à chaque actionneur.
Le processus de synchronisation de plusieurs actionneurs est nécessaire lorsque l’on met en œuvre deux actionneurs ou plus devant se déplacer à la même vitesse. Cela peut être réalisé grâce à deux formes de rétroaction de position – des capteurs à effet Hall et des potentiomètres multitours.
De légères variations dans la production des actionneurs entraînent de légères variations de la vitesse des actionneurs. Cela peut être corrigé en délivrant une tension variable à l’actionneur afin d’aligner les vitesses de deux actionneurs. La rétroaction de position est nécessaire pour déterminer quelle tension appliquer à chaque actionneur.
Synchronisation des actionneurs est importante lors du contrôle de deux actionneurs ou plus quand une commande précise est nécessaire. Par exemple, des applications qui exigent que plusieurs actionneurs déplacent une charge tout en maintenant une répartition égale de la charge sur chaque actionneur. Si un contrôle en parallèle était utilisé dans ce type d’application, une répartition inégale de la charge pourrait se produire en raison de vitesses de course variables et, à terme, exercer une force excessive sur l’un des actionneurs.
Capteur à effet Hall
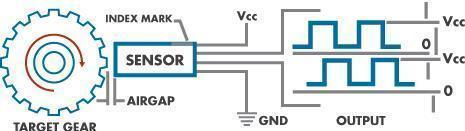
Pour résumer la théorie de l’effet Hall, Edwin Hall (qui a découvert l’effet Hall) a indiqué que chaque fois qu’un champ magnétique est appliqué perpendiculairement à l’écoulement du courant électrique dans un conducteur, une différence de tension est induite. Cette tension peut être utilisée pour détecter si le capteur est à proximité d’un aimant ou non. En fixant un aimant à l’arbre du moteur, les capteurs peuvent détecter lorsque l’arbre leur est parallèle.
À l’aide d’un petit circuit imprimé, ces informations peuvent être émises sous forme d’onde carrée, qui peut être comptée comme une suite d’impulsions. En comptant ces impulsions, vous pouvez suivre combien de fois le moteur a tourné et comment il se déplace.

Certaines cartes à effet Hall comportent plusieurs capteurs. Il est courant qu’elles aient 2 capteurs à 90 degrés, ce qui donne une sortie en quadrature. En comptant ces impulsions et en voyant laquelle arrive en premier, vous pouvez déterminer le sens de rotation du moteur. Vous pouvez aussi surveiller les deux capteurs et obtenir davantage de comptages pour un contrôle plus précis.
La synchronisation via la rétroaction des capteurs à effet Hall peut être réalisée avec le boîtier PA-40 Synchronized Dual Hall Effect Actuator Control de Progressive Automations.
Synchronisation par potentiomètre
Les potentiomètres multitours, également appelés rhéostats ou résistances variables, fournissent une représentation analogique de la position d’un actionneur. Le capteur est fixé à un système d’engrenage relié au moteur qui entraîne le potentiomètre et ajuste donc la valeur de résistance proportionnellement à la quantité de course parcourue par l’actionneur. Le changement total de résistance/tension peut être mesuré pour obtenir une plage pleine échelle de la valeur analogique qui représente la distance totale de course de l’actionneur. Les potentiomètres utilisés dans les actionneurs Progressive Automations sont des 10 kΩ.
À des fins de synchronisation, la valeur analogique de chaque potentiomètre est lue, qu’un programme/boîtier de commande peut ensuite utiliser pour déterminer la tension nécessaire à appliquer à chaque actionneur. La synchronisation par potentiomètre peut être réalisée via la programmation d’un microcontrôleur.
Importance de la synchronisation
À ce stade, les méthodes de synchronisation sont expliquées. Nous voulons maintenant voir pourquoi la synchronisation est importante. Lorsque l’objectif est d’utiliser plusieurs actionneurs pour pousser ou tirer une charge, il faut s’assurer que les actionneurs correspondent exactement en vitesse. Cette précision de vitesse des actionneurs est nécessaire pour garantir une répartition égale de la charge.Examinons une application qui nécessite une force de poussée de 700 lb et deux actionneurs. Pour cet exemple, nous utiliserons deux PA-04 IP-66 Linear Actuator d’une force nominale de 400 lb chacun, personnalisés avec des capteurs à effet Hall pour la rétroaction de position. La force dynamique combinée des deux actionneurs, lorsqu’ils sont utilisés en synchronisation, est de 800 lb. La force nécessaire pour le système est de 700 lb; la force combinée des actionneurs de 800 lb convient donc à cette application.
Comme cette application utilise deux actionneurs pour supporter la charge souhaitée, le poids doit être réparti uniformément entre les deux actionneurs. Afin d’assurer une répartition uniforme de la charge, les actionneurs doivent maintenir une hauteur égale – si cette hauteur égale n’est pas atteinte, l’un des deux actionneurs supportera un poids supplémentaire et subira un couple (ou une charge latérale). Le poids et le couple supplémentaires peuvent surmener les actionneurs et entraîner une défaillance des actionneurs.
Éléments finaux de commande
L’importance de synchroniser des actionneurs revient à garantir un mouvement uniforme de plusieurs actionneurs et à prévenir leur défaillance.
Boîtier de commande à effet Hall
Lorsque les actionneurs sont personnalisés avec des capteurs à effet Hall, le boîtier de commande PA-40 peut être utilisé pour des besoins de synchronisation par effet Hall.
Microcontrôleur Arduino
La mise en œuvre du contrôle des actionneurs peut être réalisée via la programmation Arduino. Veuillez consulter les liens suivants pour plus d’informations :
Si vous avez des questions supplémentaires, n’hésitez pas à contacter l’assistance technique pour obtenir une réponse immédiate.