




Er zijn situaties waarin je een object over een grotere afstand wilt verplaatsen dan de slaglengte van de actuator. Dat kun je bereiken met een telescopische actuator of je kunt de natuurkunde van mechanische hefboomwerking in je voordeel gebruiken. Veelvoorkomende voorbeelden hiervan zijn de schaarlift of wat onze vriend Mike Senna, de maker van de Wall‑E-robot, deed met zijn doe‑het‑zelf automatische deuropener voor een kippenhok.
Mechanische hefboomwerking
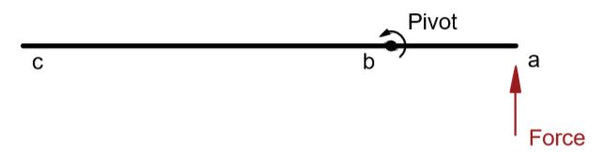
De natuurkunde achter deze toepassingen gebruikt een verhouding van afstanden vanaf het draaipunt aan beide kanten. Zoals je in figuur 1 ziet, is de actuator gemonteerd op punt ‘a’ met een vast draaipunt op punt ‘b’. Door de verhouding van ‘B’ en ‘A’ te nemen, krijg je een verhouding ‘R’. Dit betekent dat punt ‘c’ ‘R’ keer meer zal roteren dan de slag van de actuator. Dit verhoogt echter de hoeveelheid kracht die de actuator nodig heeft en de rotatiesnelheid van punt ‘c’ met ‘R’ keer. Dit is het principe achter hoe je een lineaire actuator kunt benutten op basis van zijn slaglengte en waar je hem monteert.
Doe-het-zelf automatische deuropener voor kippenhok
De toepassing van Mike Senna gebruikt hetzelfde principe als hierboven en is een goed voorbeeld van het toevoegen van een extra element om de rotatie van punt ‘c’ om te zetten in een lineaire beweging. In figuur 2 zie je dat het bovenste element rond het draaipunt roteert en de actuator op punt ‘a’ duwt.
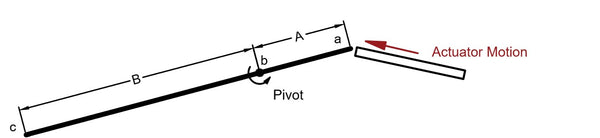
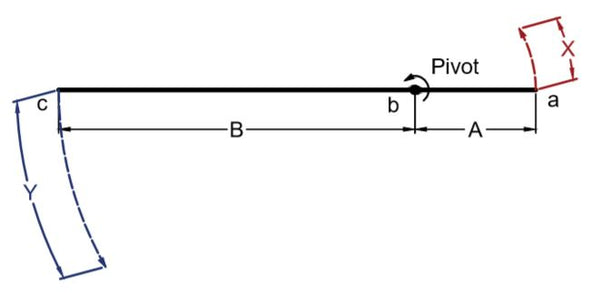
Figuur 2: Bovenste element roteert rond een draaipunt op punt b
Mike wist dat hij de deur van het kippenhok ongeveer 18 inches moest openen. Om de verhouding ‘R’ gelijk te maken aan drie zodat punt ‘c’ 18 inches zou afleggen met een slag van 6 inch, plaatste hij het draaipunt ¾ richting punt ‘a’ (figuur 3). Mike deed dit door de arm zo te positioneren dat er 3.5 inches aan de ene kant van het draaipunt en 10.5 inches (3.5 inches x 3) aan de andere kant zou zijn.
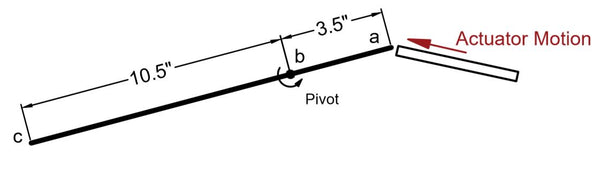
Figuur 3: Bovenste element roteert rond een draaipunt op punt b met afmetingen
Hierna voegde Mike een ander element toe om de rotatiebeweging om te zetten in lineaire beweging. Hij legt uit: “Mijn oplossing was om een andere arm toe te voegen waarvan het doel is te compenseren voor de boog, omdat het ene uiteinde zich in een boog beweegt en het andere uiteinde zich aanpast naar een lineaire beweging.” Figuur 4 is een diagram dat is gemaakt voor zijn doe‑het‑zelf automatische deuropener voor een kippenhok-project, weergegeven op verschillende posities langs de verplaatsing. Let op dat de snelheid van de kippenhokdeur en de kracht die door de actuator wordt geleverd gedurende de verplaatsing veranderen. Het kwam nu neer op het bijstellen van de positionering om de gewenste deurverplaatsing te bereiken.
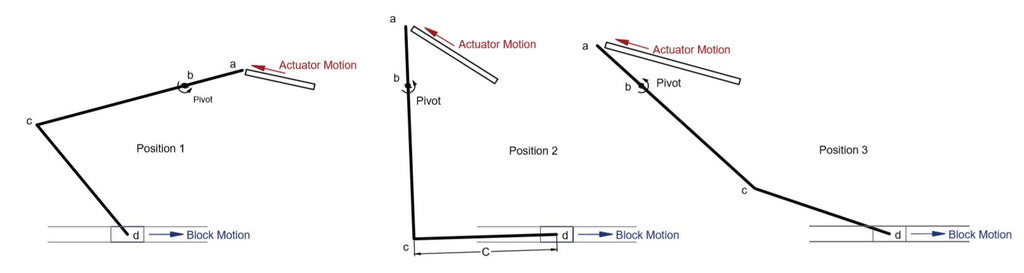
Figuur 4: Kippenhokdeur in drie verschillende posities
De schaarlift
De schaarlift is een andere toepassing die dit principe gebruikt om meer lineaire beweging te bereiken met mechanische hefboomwerking. Om een voorbeeld te geven van hoe je een lineaire actuator kunt benutten, is een 3D‑model gemaakt met een actuator voor een schaarlift om de grotere beweging van een platform te simuleren met een relatief kortere beweging van de actuator.
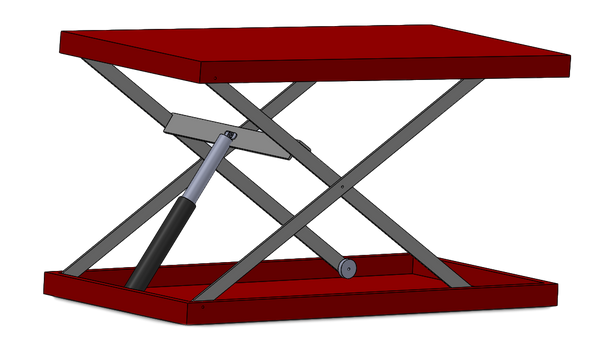
Figuur 5: 3D‑model van een enkelvoudige schaarlift
Zoals je in figuur 5 kunt zien, is een actuator voor een schaarlift met een relatief korte slag (8 inches in dit geval) gebruikt om te heffen tot een hoogte van 36 inches. Schaarliften werken volgens hetzelfde principe waarbij een element rond een draaipunt roteert en een mechanisch voordeel wordt gecreëerd. In plaats van echter een extra element toe te voegen dat enkel tot doel heeft de rotatiebeweging van één uiteinde te vertalen, wordt de beweging van de uiteinden van de elementen beperkt tot een horizontale richting. Dit resulteert erin dat de richting van de kracht uitsluitend omhoog is gericht.
Wat interessant is aan de schaarlift, is dat wanneer de actuator op de bovenste helft is gemonteerd, de lift omhooggaat terwijl de actuator uitschuift. Als de actuator echter op de onderste helft is gemonteerd, gaat de lift omhoog wanneer de actuator inschuift. Let ook op: hoe dichter de actuator bij het midden‑scharnierpunt van de elementen is gemonteerd, hoe meer de lift omhooggaat, maar hoe meer kracht de actuator nodig heeft.
Als je onderzoekt hoe je een lineaire actuator kunt benutten om een object over een grotere afstand te verplaatsen, volstaat een telescopische actuator of een doe‑het‑zelf schaarliftmechanisme. Voor een actuator voor een schaarlift of deursysteem heeft Progressive Automations verschillende modellen op voorraad met uiteenlopende slaglengtes en krachten om aan al je doe‑het‑zelfbehoeften te voldoen.