Er zijn twee methoden voor de aansturing van meerdere actuatoren: parallel en synchroon. Parallelle aansturing levert een constante spanning aan elke actuator, terwijl synchrone aansturing een variabele spanning aan elke actuator levert.
Het synchroniseren van meerdere actuatoren is nodig wanneer twee of meer actuatoren met dezelfde snelheid moeten bewegen. Dit kan worden bereikt met twee vormen van positionele terugkoppeling: Hall‑effectsensoren en meeromwentelingspotentiometers.
Kleine variaties in de productie van actuatoren leiden tot kleine variaties in actuatorsnelheid. Dit kan worden gecorrigeerd door een variabele spanning naar de actuator uit te sturen om de snelheden van twee actuatoren op elkaar af te stemmen. De positionele terugkoppeling is nodig om te bepalen hoeveel spanning naar elke actuator moet worden gestuurd.
Synchronisatie van actuatoren is belangrijk wanneer twee of meer actuatoren worden aangestuurd en nauwkeurige regeling nodig is. Bijvoorbeeld bij toepassingen waarbij meerdere actuatoren een Belasting moeten verplaatsen met gelijke belastingsverdeling over elke actuator. Als in dit soort toepassing parallelle aansturing wordt gebruikt, kan een ongelijke belastingsverdeling optreden door variabele actuatorsnelheden, wat uiteindelijk tot overmatige kracht op een van de actuatoren kan leiden.
Hall‑effectsensor
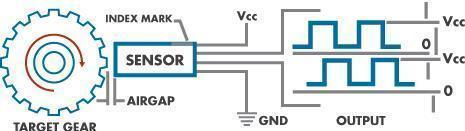
Samengevat stelt de Hall‑effecttheorie, ontdekt door Edwin Hall, dat wanneer een magnetisch veld wordt aangelegd in een richting loodrecht op de stroom van elektrische stroom in een geleider, er een spanningsverschil wordt geïnduceerd. Met deze spanning kan worden gedetecteerd of de sensor zich in de nabijheid van een magneet bevindt. Door een magneet op de as van de Motor te bevestigen, kunnen de sensoren detecteren wanneer de as langs hen passeert.
Met een kleine printplaat kan deze informatie worden uitgegeven als een blokgolf, die kan worden geteld als een reeks pulsen. Door deze pulsen te tellen, kun je bijhouden hoe vaak de Motor heeft gedraaid en hoe de Motor beweegt.

Sommige Hall‑effectprintplaten hebben meerdere sensoren. Vaak hebben ze 2 sensoren onder 90 graden, wat resulteert in een kwadratuuruitgang. Door deze pulsen te tellen en te zien welke eerst komt, kun je de draairichting van de Motor bepalen. Je kunt ook beide sensoren monitoren en meer tellen verkrijgen voor een preciezere regeling.
Synchronisatie via Hall‑effectsensor‑terugkoppeling kan worden bereikt met de Progressive Automations PA-40 Synchronized Dual Hall Effect Actuator Control-kast.
Synchronisatie met potentiometer
Meeromwentelingspotentiometers, ook wel reostaten of variabele weerstanden genoemd, geven een analoge representatie van de positie van een actuator. De sensor is bevestigd aan een tandwieloverbrenging die op de Motor is gemonteerd en de potentiometer aandrijft en zo de weerstandswaarde proportioneel aanpast aan de hoeveelheid verplaatsing die de actuator heeft gemaakt. De totale weerstand-/spanningsverandering kan worden gemeten om een volschaalbereik van de analoge waarde te verkrijgen, die de totale Slaglengte van de actuator vertegenwoordigt. De potentiometers die in de actuatoren van Progressive Automations worden gebruikt, zijn 10KΩ.
Voor synchronisatiedoeleinden wordt de analoge waarde van elke potentiometer uitgelezen, welke een programma/besturingskast vervolgens kan gebruiken om de benodigde spanningsuitgang naar elke actuator te bepalen. Potentiometersynchronisatie kan worden bereikt via microcontroller-programmering.
Belang van synchronisatie
Op dit punt zijn de methoden van synchronisatie uitgelegd. Nu willen we kijken waarom synchronisatie belangrijk is. Wanneer meerdere actuatoren worden gebruikt om een Belasting te duwen of te trekken, moeten de actuatoren exact dezelfde snelheid aanhouden. Deze nauwkeurigheid in actuatorsnelheid is nodig om een gelijke belastingsverdeling te waarborgen.Laten we kijken naar een toepassing die een duwkracht van 700 lbs en twee actuatoren vereist. Voor dit voorbeeld gebruiken we twee PA-04 IP-66 lineaire actuator met een krachtwaarde van 400 lbs elk, aangepast met HALL‑effectsensoren voor positionele terugkoppeling. De gecombineerde dynamische kracht van de twee actuatoren, wanneer ze synchroon worden gebruikt, is 800 lbs. De kracht die voor het systeem nodig is, is 700 lbs, dus de gecombineerde actuator‑krachtwaarde van 800 lbs is acceptabel voor deze toepassing.
Omdat in deze toepassing twee actuatoren worden gebruikt om de gewenste Belasting te dragen, moet het gewicht gelijkmatig over de twee actuatoren worden verdeeld. Om een gelijke belastingsverdeling te waarborgen, moeten de actuatoren dezelfde hoogte aanhouden – als die gelijke hoogte niet wordt bereikt, zal een van de twee actuatoren extra gewicht dragen en torsie (of zijdelingse belasting) ervaren. Het extra gewicht en de torsie kunnen de actuatoren overbelasten, wat tot falen kan leiden.
Eindregelorganen
Het belang van het synchroniseren van actuatoren komt neer op het waarborgen van uniforme beweging van meerdere actuatoren en het voorkomen van actuatorfalen.
Hall‑effect‑besturingskast
Wanneer actuatoren zijn aangepast met HALL‑effectsensoren, kan de PA-40 control box worden gebruikt voor Hall‑effect‑synchronisatie.
Arduino‑microcontroller
De implementatie van actuatorbesturing kan worden gerealiseerd via Arduino‑programmering. Bezoek de volgende links voor meer informatie:
Als je nog vragen hebt, neem dan gerust contact op met onze technische support en krijg direct antwoord.