
- Wprowadzenie: Jak działają siłowniki
- Mechanizmy sprzężenia zwrotnego położenia
- Rodzaje systemów sterowania dla siłowników
- Informacja zwrotna i korekta błędów
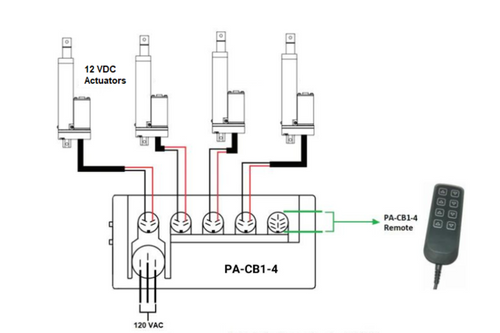
- Skrzynki sterujące do siłowników liniowych
Wprowadzenie: Jak działają siłowniki
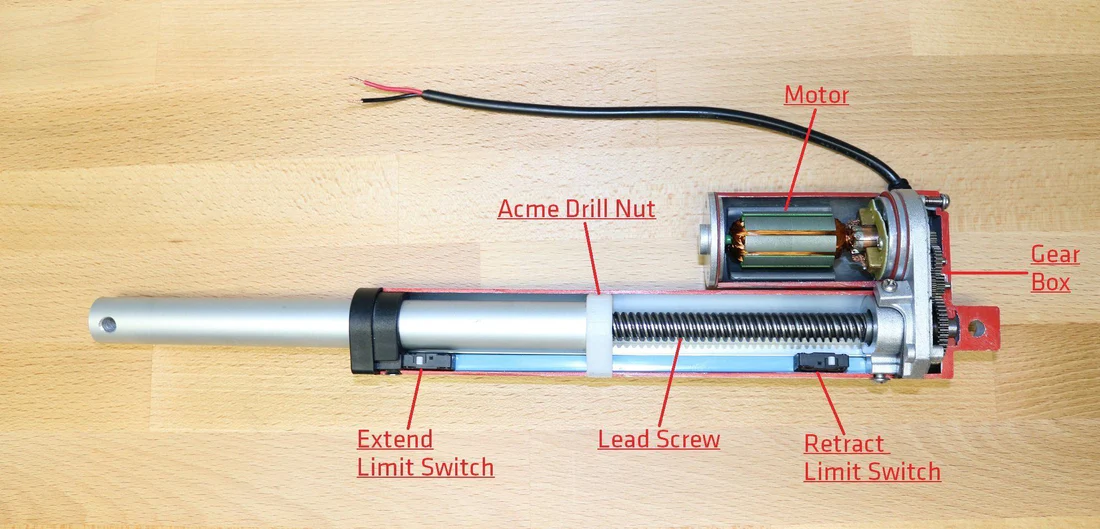
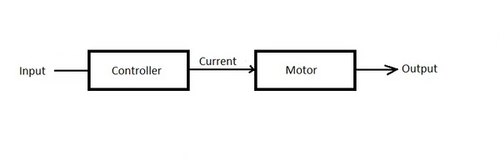
W elektryczne siłowniki liniowe, prąd elektryczny jest używany do wytwarzania ruchu obrotowego w silniku elektrycznym który jest mechanicznie połączony z przekładnią i wykorzystuje lead
screw aby napędzać wał siłownika przymocowany do ACME nakrętki wiertniczej do ruchu liniowego. Systemy sterowania siłowników znacznie rozwinęły się na przestrzeni lat, zwiększając wszechstronność i funkcjonalność tych urządzeń. Siłowniki liniowe można obsługiwać za pomocą różnych metod i mechanizmów sterowania, w tym:
• Sterowniki bezprzewodowe - oferują użytkownikom wygodę zdalnego sterowania na odległość bez konieczności stosowania kabli.
• Sterowniki obsługujące Wi‑Fi i Bluetooth - umożliwiają integrację z inteligentnymi systemami oraz dostęp przez urządzenia mobilne, zapewniając przyjazne interfejsy i możliwość zdalnej i precyzyjnej regulacji ustawień.
Te postępy w technologii siłowników i systemów sterowania poszerzyły zakres ich zastosowań, czyniąc je niezbędnymi we współczesnych zautomatyzowanych systemach. Niezależnie od tego, czy chodzi o regulację okien w pojazdach, obsługę ciężkiego sprzętu rolniczego, czy automatyzację urządzeń domowych, siłowniki nadal odgrywają kluczową rolę w przekształcaniu sygnałów elektrycznych w działanie fizyczne.

Zrozumienie systemów sterowania dla siłowników
Głównym celem tych systemów jest zapewnienie dokładnej, wydajnej i niezawodnej pracy siłowników, zgodnie z predefiniowanymi parametrami. Znaczenia systemów sterowania w działaniu siłowników nie można przecenić, szczególnie w kontekście precyzyjnego i wydajnego sterowania ruchem. Te systemy są kluczowe z kilku powodów:
1. Precyzja: Systemy sterowania umożliwiają precyzyjne dostrojenie ruchów siłowników, aby osiągnąć wysoki poziom powtarzalności i dokładności. Jest to niezbędne w zastosowaniach, w których dokładne pozycjonowanie ma kluczowe znaczenie, takich jak chirurgia robotyczna czy inżynieria lotnicza.
2. Wydajność: Optymalizując sposób, w jaki siłowniki reagują na polecenia, systemy sterowania zmniejszają zużycie energii i minimalizują zużycie. Nie tylko wydłuża to żywotność siłownika, ale także zwiększa ogólną wydajność systemu, w którym działa.
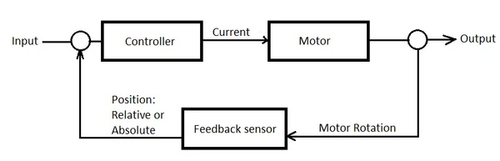
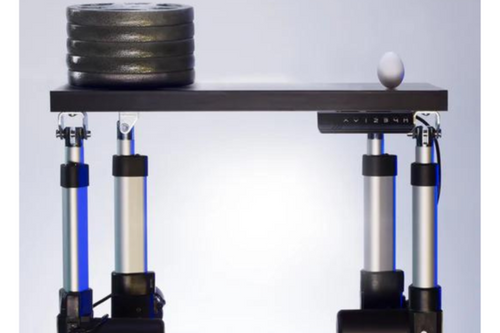
3. Adaptowalność: Mechanizmy sprzężenia zwrotnego mogą regulować działanie kompatybilnych siłowników w czasie rzeczywistym, analizując sprzężenie zwrotne od położenia kompatybilnych siłowników. Ta adaptowalność jest niezbędna w dynamicznych środowiskach, w których warunki zmieniają się szybko, na przykład w zautomatyzowanych procesach produkcyjnych lub gdy wiele siłowników charakteryzuje się nierównomiernym rozkładem masy.
5. Funkcje bezpieczeństwa: Zaprogramowane funkcje bezpieczeństwa, takie jak zabezpieczenie przed przeciążeniem, pomagają zapobiegać uszkodzeniom siłownika lub aplikacji poprzez zatrzymanie działania po wykryciu przez skrzynkę sterowniczą nadmiernie wysokiego poboru prądu. Kolejną funkcją bezpieczeństwa zastosowaną w skrzynkach sterowniczych jest zabezpieczenie przed przegrzaniem, które zatrzymuje działanie po upływie określonego czasu cyklu, zapewniając, że działanie pozostaje w zakresie znamionowego cyklu pracy siłownika, zapobiegając w ten sposób przepaleniu silnika. Systemy sterowania są podstawą działania siłowników, zapewniając niezbędną inteligencję i elastyczność, gwarantując precyzję, wydajność, bezpieczeństwo i efektywne sterowanie ruchem. Ich rola jest kluczowa w rozwijającym się obszarze technologii automatyzacji, gdzie precyzja ruchu jest często podstawą sukcesu operacyjnego.
Komponenty i typy systemów sterowania
Kluczowe komponenty podstawowej skrzynki sterowniczej
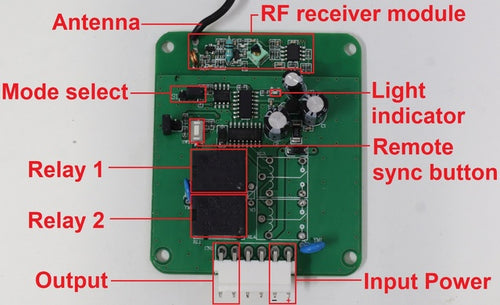
W podstawowej skrzynce sterowniczej przeznaczonej do elektrycznych siłowników liniowych każdy komponent odgrywa kluczową rolę w zapewnieniu wydajnej pracy. Oto zestawienie tych głównych komponentów, ich funkcji i celów, którym służą:1. Przekaźniki: Przekaźniki działają jako przełączniki, które sterują obwodem elektrycznym dużej mocy za pomocą sygnału małej mocy. W przypadku skrzynek sterowniczych zaprojektowanych do zarządzania siłownikami dwuprzewodowymi, dwa przekaźniki są niezbędne do odwrócenia polaryzacji napięcia przyłożonego do dwóch przewodów siłownika, co z kolei zmienia kierunek ruchu. Umożliwia to dwukierunkowe sterowanie w prostym układzie, umożliwiając wysuwanie i wsuwanie siłownika.
2. Kanały wejściowe: Kanały wejściowe to interfejsy, za pośrednictwem których system sterowania odbiera sygnały elektryczne ze źródeł zewnętrznych, takich jak zasilacze lub sygnały z przewodowych pilotów. Skrzynki sterownicze działające ze sprzężeniem zwrotnym położenia mogą również odbierać dane wejściowe z czujników siłownika. Kanały te przetwarzają dane wejściowe od użytkownika i/lub czujników, aby określić sposób działania siłownika, co czyni je kluczowymi dla inicjowania i sterowania ruchami siłownika w oparciu o określone wymagania.
3. Kanały wyjściowe: Kanały wyjściowe dostarczają sygnały sterujące ze sterownika do siłownika lub innych komponentów, takich jak przekaźniki. Skrzynki sterownicze działające ze sprzężeniem zwrotnym położenia mogą również generować prąd elektryczny, aby czujniki siłownika miały zasilanie. Kanały te są kluczowe dla wykonywania poleceń określonych przez system sterowania, bezpośrednio wpływając na zachowanie siłownika.
4. Przycisk synchronizacji zdalnej: Ten przycisk służy do synchronizacji systemu sterowania z urządzeniem sterującym. Zapewnia rozpoznawanie i przetwarzanie sygnałów wejściowych przez system sterowania, ułatwiając wygodną i elastyczną obsługę z dużej odległości.
5. Wskaźnik świetlny: Wskaźniki świetlne zapewniają wizualną informację zwrotną o stanie systemu. Mogą sygnalizować włączanie/wyłączanie zasilania, tryby pracy, stany błędów lub odbiór sygnału, co ułatwia monitorowanie i rozwiązywanie problemów z systemem bez konieczności stosowania skomplikowanych narzędzi diagnostycznych.
6. Wybór trybu: Ta funkcja umożliwia użytkownikowi przełączanie między różnymi trybami pracy skrzynki sterowniczej, takimi jak sterowanie chwilowe lub niechwilowe. W trybie chwilowym przycisk pilota musi być stale przytrzymywany w pozycji aktywnej, aby urządzenie działało. Po zwolnieniu przełącznika urządzenie przestaje działać. Tryb niechwilowy działa jak przełącznik, który pozostaje w ostatnio ustawionej pozycji do momentu jej ponownej zmiany, niezależnie od tego, czy jest wciśnięty. Oznacza to, że po aktywacji urządzenie kontynuuje działanie do momentu ręcznego wyłączenia przełącznika.
7. Antena: Antena jest częścią skrzynek sterowniczych wyposażonych w układ komunikacji bezprzewodowej. Anteny służą do zwiększenia zasięgu i jakości sygnału między systemem sterowania a urządzeniami zdalnego sterowania lub między systemami połączonymi. Jest to kluczowe dla utrzymania niezawodnej komunikacji w środowiskach, w których bezpośrednie okablowanie jest niepraktyczne lub niepożądane.
8. Moduł odbiornika RF: Ten moduł odbiera sygnały radiowe wysyłane przez bezprzewodowe piloty zdalnego sterowania. Dekoduje te sygnały na polecenia, które system sterowania może zrozumieć i na które może zareagować. Moduł odbiornika RF jest niezbędny w konfiguracjach sterowania bezprzewodowego, umożliwiając zdalną obsługę siłownika bez kontaktu fizycznego. Wspólnie te komponenty tworzą kompleksowy system sterowania siłownikami 2-przewodowymi, z których każdy pełni określoną funkcję, która przyczynia się do ogólnej skuteczności i wydajności działania siłownika. System ten nie tylko pozwala na precyzyjną kontrolę ruchów siłownika, ale także ulepsza interfejs użytkownika i interakcję, dzięki czemu można go dostosować do szerokiej gamy zastosowań.
Mechanizmy sprzężenia zwrotnego położenia
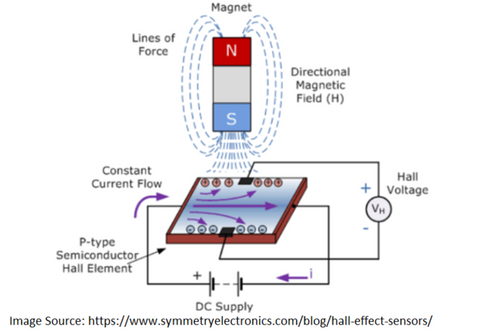
Czujniki efektu Halla
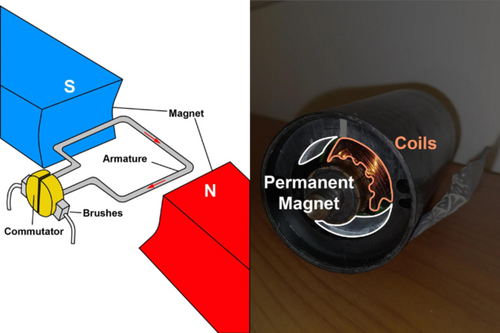
Teorię efektu Halla — Edwin Hall (który odkrył efekt Halla) — sformułował, że za każdym razem, gdy pole magnetyczne jest przyłożone w kierunku prostopadłym do przepływu prądu elektrycznego w przewodniku, powstaje różnica potencjałów. To napięcie można wykorzystać do wykrycia, czy czujnik efektu Halla znajduje się w pobliżu magnesu.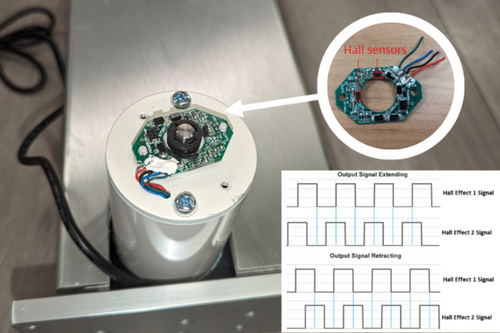
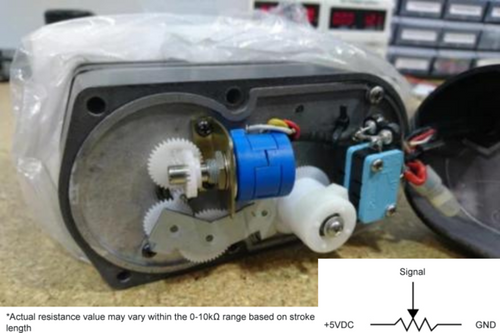
Potencjometry
Potencjometr zapewnia zmienną rezystancję proporcjonalną do położenia siłownika. Koła zębate są często sprzężone między pokrętłem potencjometru a obracającym się silnikiem siłownika. W miarę przemieszczania się siłownika wartość rezystancji zmienia się, co można zmierzyć i przekształcić w dane o położeniu. Te informacje są następnie wykorzystywane przez system sterowania do dokonywania drobnych korekt położenia siłownika, zwiększając dokładność.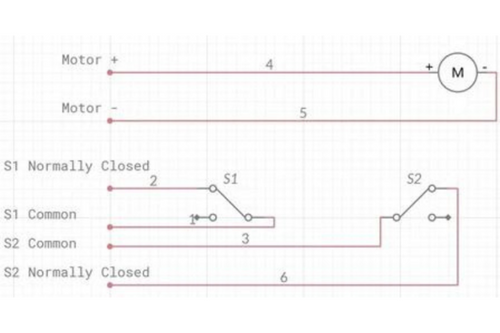
Sprzężenie zwrotne wyłączników krańcowych
Celem sygnałów sprzężenia zwrotnego wyłączników krańcowych jest umożliwienie systemowi określenia, czy siłownik fizycznie zadziałał wewnętrzne wyłączniki krańcowe. Tego rodzaju sprzężenie jest proste i przydatne w zastosowaniach, które głównie wymagają informacji o tym, czy siłownik osiągnął pozycję całkowicie wysuniętą lub całkowicie wsuniętą.Rodzaje systemów sterowania dla siłowników
Przykładem prostego systemu otwartej pętli jest chwilowy przełącznik kołyskowy podłączony do siłownika liniowego. Wymaga to od operatora fizycznego naciśnięcia i przytrzymania przełącznika, aby siłownik kontynuował ruch; puszczenie przełącznika przed osiągnięciem przez siłownik końca skoku spowoduje zatrzymanie ruchu siłownika w połowie drogi.
Wybór systemu sterowania i jego komponentów ma znaczący wpływ na funkcjonalność siłowników i optymalizację ich wydajności. Poprzez integrację skutecznych mechanizmów sprzężenia zwrotnego i wybór odpowiedniego typu systemu sterowania, siłowniki można zoptymalizować do szerokiego zakresu zastosowań, zapewniając zarówno precyzję, jak i niezawodność ich działania.
Informacja zwrotna i korekta błędów
Zmienne, które korygują systemy sterowania
1. Pozycja: Systemy sterowania pomagają zapewnić, że siłownik osiąga i utrzymuje zadaną pozycję z wymaganą dokładnością, porównując żądaną pozycję użytkownika z rzeczywistym odczytem pozycji z czujników sprzężenia zwrotnego. Przykładem są sytuacje, gdy użytkownicy biurek regulowanych naciskają przycisk sterownika, aby siłowniki przemieściły się do określonej, wstępnie zaprogramowanej pozycji pamięci i dostosowały miejsce pracy z wysokości siedzącej do stojącej.
2. Prędkość: Odczyt sprzężenia zwrotnego pozycji i podzielenie przebytej odległości przez upływ czasu daje prędkość ruchu. Niektóre systemy sterowania pozwalają na regulację ustawień prędkości za pomocą PWM (Pulse Width Modulation), co umożliwia siłownikowi poruszanie się z różnymi prędkościami w zależności od wymagań zastosowania. Jest to przydatne w aplikacjach, w których konieczne są zmienne prędkości, na przykład w siłownikach napędzających ruch symulatorów lotu.
3. Siła: Niektóre systemy sterowania mogą regulować siłę wywieraną przez siłowniki, zapewniając pracę w bezpiecznych granicach i zapobiegając uszkodzeniom systemu lub otaczających komponentów. Poprzez pomiar poboru prądu elektrycznego systemy sterowania mogą w przybliżeniu ocenić, jaką siłę wywiera siłownik liniowy. Ta funkcja jest przydatna w siłownikach liniowych otwierających i zamykających okna — wyłącza zasilanie i zaprzestaje przykładania siły, jeśli ręka osoby lub przeszkoda blokuje tor ruchu.
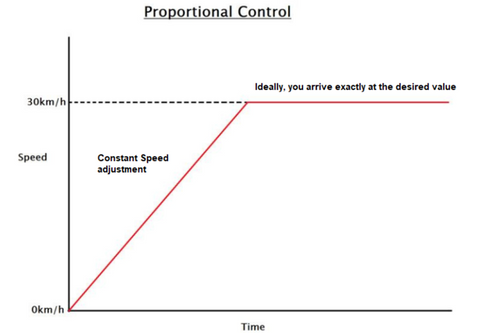
Rodzaje strategii sterowania
Wybór odpowiedniego systemu sterowania
• Ingress Protection
• Compatibility
• Budget
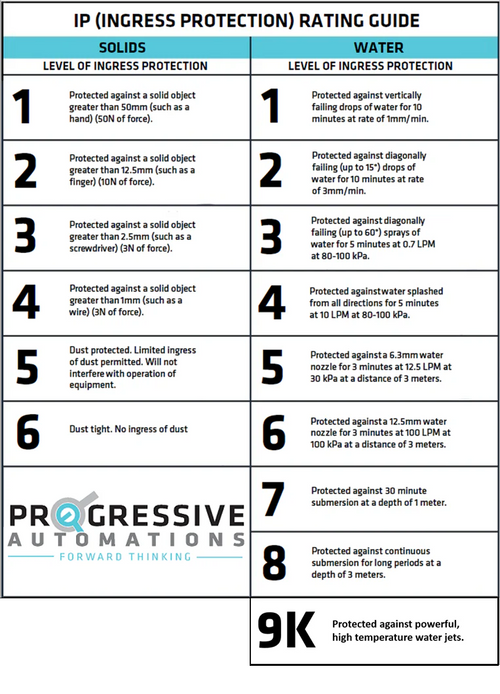
1. Ingress Protection: Assess the specific environmental requirements of your application to determine the type of control systems needed. The PA-33 control box for example has an ingress protection rating of IP65 for dust and water resistance. An ingress protection rating of IP65 or higher is recommended for control systems exposed to outdoor elements such as rainwater, dust, and debris. 2. Compatibility: Ensure that the control system is compatible with the electric linear actuators you have chosen or are currently using to ensure seamless integration. Check if your actuator has the matching communication protocols/positional feedback to the controllers you were considering. For example, the PA-12-T (TTL/PWM) and PA-12-R (RS-485) Micro Precision Servo Actuator provide precise position control with positional accuracy up to 100 um and require advanced communication protocols for such performance. Another thing to consider is whether the type of motor your actuator has will be compatible with a control system. Continuously operating brushless motors such as those found in our custom ordered PA-14 actuators would require control boxes compatible with their operation such as the LC-241 control box. To see which of our control boxes and actuators are compatible with each other, check out our control box comparison and compatibility charts linked below: https://7717445.fs1.hubspotusercontent-na1.net/hubfs/7717445/PDF%20Manuals/Desk%20Accessories/Control%20Boxes%20Compatibility%20Chart%202023.pdf https://7717445.fs1.hubspotusercontent-na1.net/hubfs/7717445/PDF%20Manuals/Desk%20Accessories/Control%20Boxes%20Comparison%20Chart-1.pdf 3. Budget: Consider if there were any budget constraints for the project and choose a control system that offers the best value for your investment while meeting your performance requirements. For example, simple indoor projects that do not require high precision would work without any issues by wiring a basic rocker switch without high ingress protection to control a 2-wire mini linear actuator at an affordable price.

Skrzynki sterujące z czujnikiem Halla
Przeczytaj nasz wpis na blogu o zastosowaniach skrzynek sterujących FLTCON, aby uzyskać więcej informacji.
