Existujú dve metódy riadenia viacerých aktuátorov – paralelné a synchronné. Pri paralelnom riadení sa na každý aktuátor privádza konštantné napätie, zatiaľ čo pri synchronnom riadení sa na každý aktuátor privádza premenlivé napätie.
Proces synchronizácie viacerých aktuátorov je nevyhnutný, keď sa majú dva alebo viac aktuátorov pohybovať rovnakou rýchlosťou. Dá sa to dosiahnuť dvoma formami polohovej spätnej väzby – snímačmi Hallovho efektu a viacotáčkovými potenciometrami.
Menšie odchýlky vo výrobe aktuátorov vedú k drobným rozdielom v rýchlosti aktuátora. To možno korigovať privedením premenlivého napätia na aktuátor tak, aby sa zladili rýchlosti dvoch aktuátorov. Polohová spätná väzba je potrebná na určenie, koľko napätia je potrebné priviesť na každý aktuátor.
Synchronizácia aktuátorov je dôležitá pri riadení dvoch alebo viacerých aktuátorov, kde je potrebné presné riadenie. Napríklad pri aplikáciách, ktoré vyžadujú, aby viaceré aktuátory pohybovali zaťažením a zároveň zachovali rovnomerné rozloženie zaťaženia na každý aktuátor. Ak by sa v takomto prípade použilo paralelné riadenie, v dôsledku premenlivých rýchlostí zdvihu môže dôjsť k nerovnomernému rozloženiu zaťaženia a napokon k nadmernému namáhaniu jedného z aktuátorov.
Snímač Hallovho efektu
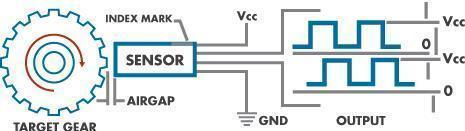
Stručne k teórii Hallovho efektu: Edwin Hall (ktorý Hallov efekt objavil) uviedol, že vždy, keď sa na smer kolmom na tok elektrického prúdu vo vodiči aplikuje magnetické pole, indukuje sa rozdiel napätia. Toto napätie možno použiť na zistenie, či je snímač v blízkosti magnetu, alebo nie. Pripojením magnetu na hriadeľ motora dokážu snímače detegovať, keď je hriadeľ s nimi rovnobežný.
Pomocou malej dosky s elektronikou sa tieto informácie dajú vyviesť ako obdĺžnikový priebeh, ktorý možno počítať ako sled impulzov. Počítaním týchto impulzov môžete sledovať, koľkokrát sa motor otočil a ako sa motor pohybuje.

Niektoré dosky so snímačmi Hallovho efektu majú na sebe viacero snímačov. Bežné je, že majú 2 snímače pod uhlom 90 stupňov, čo vedie ku kvadratúrnemu výstupu. Počítaním týchto impulzov a zistením, ktorý prichádza skôr, môžete určiť smer otáčania motora. Prípadne stačí monitorovať oba snímače a získať viac impulzov pre presnejšie riadenie.
Synchronizáciu prostredníctvom spätnej väzby zo snímača Hallovho efektu možno dosiahnuť pomocou riadiacej jednotky PA-40 Synchronized Dual Hall Effect Actuator Control od Progressive Automations.
Synchronizácia pomocou potenciometra
Viacotáčkové potenciometre, známe aj ako reostaty alebo premenné odpory, poskytujú analógové zobrazenie polohy aktuátora. Snímač je upevnený na prevodovom systéme pripojenom k motoru, ktorý otáča potenciometrom a tým upravuje hodnotu odporu úmerne dráhe, ktorú aktuátor prešiel. Celkovú zmenu odporu/napätia možno zmerať a získať tak plný rozsah analógovej hodnoty, ktorá reprezentuje celkovú dĺžku zdvihu aktuátora. Potenciometre použité v aktuátoroch Progressive Automations sú 10KΩ.
Na účely synchronizácie sa číta analógová hodnota každého potenciometra; program/riadiaca jednotka ju potom použije na určenie potrebného výstupného napätia pre každý aktuátor. Synchronizáciu s potenciometrom možno dosiahnuť programovaním mikrokontroléra.
Dôležitosť synchronizácie
V tejto chvíli sú metódy synchronizácie vysvetlené. Teraz sa chceme pozrieť na to, prečo je synchronizácia dôležitá. Keď je cieľom použiť viac aktuátorov na tlačenie alebo ťahanie zaťaženia, musíme zabezpečiť, aby aktuátory presne zladili rýchlosti. Táto presnosť rýchlosti aktuátorov je potrebná na zabezpečenie rovnomerného rozloženia zaťaženia.Pozrime sa na aplikáciu, ktorá vyžaduje tlačnú silu 700 lbs a dva aktuátory. V tomto príklade použijeme dva PA-04 IP-66 Lineárny aktuátor s menovitou silou 400 lbs, každý upravený o snímače HALL efektu pre polohovú spätnú väzbu. Kombinovaná dynamická menovitá sila dvoch aktuátorov pri synchronnej prevádzke je 800 lbs. Potrebná sila pre systém je 700 lbs, takže kombinovaná sila aktuátorov 800 lbs by bola pre túto aplikáciu prijateľná.
Keďže táto aplikácia používa dva aktuátory na nesenie požadovaného zaťaženia, hmotnosť musí byť rovnomerne rozložená na oba aktuátory. Aby sa zabezpečilo rovnomerné rozloženie zaťaženia, aktuátory musia udržiavať rovnakú výšku – ak sa rovnaká výška nedosiahne, jeden z dvoch aktuátorov ponesie dodatočnú hmotnosť a bude vystavený krútiacemu momentu (alebo bočnému zaťaženiu). Dodatočná hmotnosť a krútiaci moment môžu aktuátory nadmerne namáhať, čo vedie k ich zlyhaniu.
Záverečné riadiace prvky
Dôležitosť synchronizácie aktuátorov sa v konečnom dôsledku týka zabezpečenia rovnomerného pohybu viacerých aktuátorov a predchádzania ich zlyhaniu.
Riadiaca jednotka s Hallovým efektom
Keď sú aktuátory prispôsobené snímačmi HALL efektu, na účely synchronizácie pomocou Hallovho efektu možno použiť riadiacu jednotku PA-40.
Mikrokontrolér Arduino
Implementáciu riadenia aktuátorov možno dosiahnuť programovaním Arduino. Navštívte nasledujúce odkazy pre viac informácií:
- Programovanie Arduina
- Synchronizácia podľa Hallovho efektu
- Polohové riadenie so spätnou väzbou z potenciometra
Ak máte nejaké ďalšie otázky, neváhajte kontaktovať technickú podporu a získajte okamžitú odpoveď.