Existen dos métodos de control de múltiples actuadores: en paralelo y síncrono. El control en paralelo proporciona un voltaje constante a cada actuador, mientras que el control síncrono aplica un voltaje variable a cada actuador.
El proceso de sincronizar múltiples actuadores es necesario cuando se emplean dos o más actuadores para moverse a la misma velocidad. Esto puede lograrse con dos formas de retroalimentación de posición: sensores de efecto Hall y potenciómetros multivuelta.
Pequeñas variaciones en la fabricación de los actuadores producen ligeras diferencias en su velocidad. Esto puede corregirse aplicando un voltaje variable al actuador para igualar la velocidad de dos actuadores. La retroalimentación de posición es necesaria para determinar cuánto voltaje se debe aplicar a cada actuador.
La sincronización de actuadores es importante cuando se controlan dos o más actuadores y se requiere control preciso. Por ejemplo, aplicaciones que necesitan que varios actuadores muevan una carga manteniendo una distribución de carga uniforme en cada actuador. Si en este tipo de aplicación se utilizara control en paralelo, podría producirse una distribución desigual de la carga debido a las diferentes velocidades de carrera y, en última instancia, generar una fuerza excesiva en uno de los actuadores.
Sensor de efecto Hall
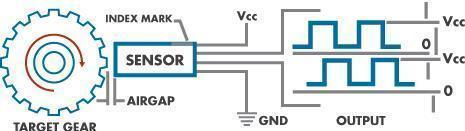
En resumen de la teoría del efecto Hall, Edwin Hall (quien descubrió el efecto Hall), afirmó que siempre que se aplica un campo magnético en una dirección perpendicular al flujo de corriente eléctrica en un conductor, se induce una diferencia de voltaje. Este voltaje puede utilizarse para detectar si el sensor está cerca de un imán o no. Al colocar un imán en el eje del motor, los sensores pueden detectar cuándo el eje está paralelo a ellos.
Usando una pequeña placa de circuito, esta información puede emitirse como una onda cuadrada, que puede contarse como una cadena de pulsos. Al contar estos pulsos puedes llevar un registro de cuántas veces ha girado el motor y cómo se mueve.

Algunas placas de circuito de efecto Hall incluyen múltiples sensores. Es habitual que tengan 2 sensores a 90 grados, lo que produce una salida en cuadratura. Contando estos pulsos y viendo cuál llega primero, puedes saber en qué dirección está girando el motor. O bien puedes supervisar ambos sensores y obtener más pulsos para un control más preciso.
La sincronización mediante retroalimentación de sensores de efecto Hall puede lograrse con la caja PA-40 Synchronized Dual Hall Effect Actuator Control de Progressive Automations.
Sincronización con potenciómetro
Los potenciómetros multivuelta, también conocidos como reóstatos o resistencias variables, proporcionan una representación analógica de la posición de un actuador. El sensor está fijado a un sistema de engranajes unido al motor que hace girar el potenciómetro y, por lo tanto, ajusta el valor de resistencia de forma proporcional al desplazamiento que ha realizado el actuador. El cambio total de resistencia/voltaje puede medirse para obtener un rango a escala completa del valor analógico que representa la distancia total de carrera del actuador. Los potenciómetros utilizados en los actuadores de Progressive Automations son de 10KΩ.
Para fines de sincronización, se lee el valor analógico de cada potenciómetro, que un programa/caja de control puede usar luego para determinar el voltaje necesario a aplicar a cada actuador. La sincronización por potenciómetro puede lograrse mediante programación de microcontrolador.
Importancia de la sincronización
At this point, the methods of synchronization are explained. Now we want to look at why synchronization is important. When the goal of using multiple actuators to push or pull a load is required, we need to ensure that the actuators match speeds precisely. This precision in actuator speed is needed to ensure equal load distribution.Echemos un vistazo a una aplicación que requiere una fuerza de empuje de 700 libras y dos actuadores. Para este ejemplo, usaremos dos PA-04 IP-66 Linear Actuator con una clasificación de fuerza de 400 libras cada uno personalizados con sensores de efecto HALL para retroalimentación de posición. La clasificación de fuerza dinámica combinada de los dos actuadores, cuando se usan sincronizados, es de 800 libras. La fuerza necesaria para el sistema es 700 libras por lo que la clasificación de fuerza combinada de 800 libras sería aceptable para esta aplicación.
Dado que esta aplicación utiliza dos actuadores para sostener la carga deseada, el peso debe distribuirse uniformemente entre ambos. Para garantizar una distribución uniforme de la carga, los actuadores deben mantener la misma altura; si no se alcanza la misma altura, uno de los dos actuadores soportará peso adicional y experimentará torsión (o carga lateral). El peso y la torsión adicionales pueden sobreexigir los actuadores, lo que puede provocar fallos del actuador.
Elementos finales de control
La importancia de sincronizar actuadores se reduce a garantizar el movimiento uniforme de múltiples actuadores y a prevenir fallos en los actuadores.
Caja de control por efecto Hall
Cuando los actuadores se personalizan con sensores de efecto HALL, la caja de control PA-40 puede usarse para propósitos de sincronización por efecto Hall.
Microcontrolador Arduino
La implementación del control de actuadores puede lograrse mediante programación en Arduino. Visita los siguientes enlaces para obtener más información:
- Programación en Arduino
- Sincronización por efecto Hall
- Control de posición con retroalimentación por potenciómetro
Si tienes alguna pregunta adicional, no dudes en ponerte en contacto con el soporte de ingeniería y obtener una respuesta al instante.