



Controlador de motor CC sin escobillas de 12-24 VDC - 1 canal - 8 A
Controlador de motor CC sin escobillas de 12-24 VDC - 1 canal - 8 A
Modelo: LC-241
No se pudo cargar la disponibilidad de recogida



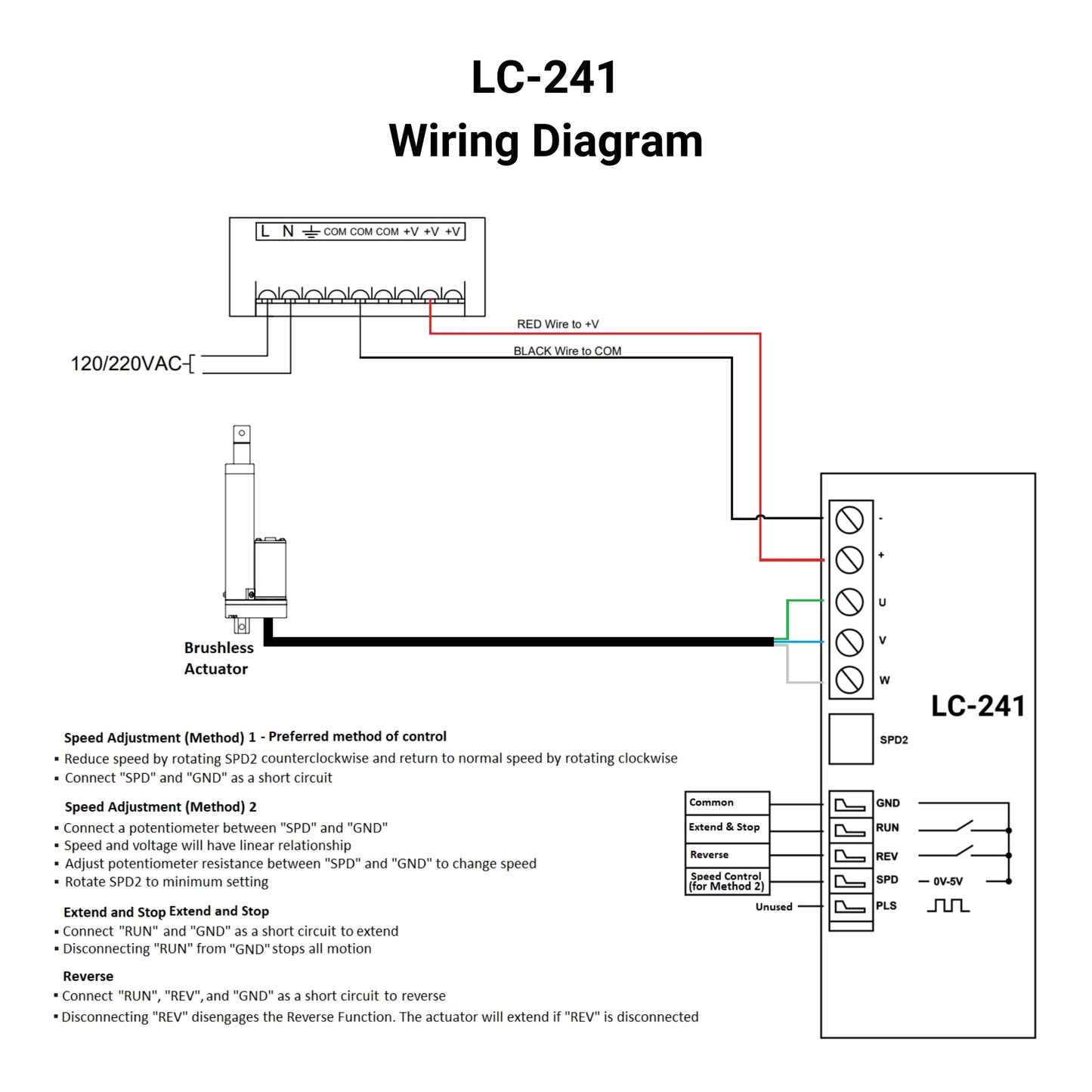
El controlador de motor de corriente continua sin escobillas LC-241 permite un control total del ciclo de trabajo de un actuador lineal de corriente continua sin escobillas. Al utilizar las entradas de control, el usuario tiene un control total sobre la velocidad y la dirección de un actuador de corriente continua sin escobillas. Nuestros actuadores lineales PA-14 y PA-14P se pueden personalizar para que tengan un motor de corriente continua sin escobillas que funcione con el controlador LC-241.
Utilizando los terminales de tornillo, conecte los actuadores lineales a la caja de control. Aplica entre 12 y 24 VDC en los cables de alimentación y sigue la información de integración del control que se encuentra en el manual del usuario del LC-241.
Es importante asegurarse de que la fuente de alimentación tenga un amperaje nominal suficiente para controlar los actuadores lineales. El LC-241 está diseñado para controlar un actuador lineal de corriente continua sin escobillas de 8 A y 12-24 VDC como máximo.
* Solo compatible con motores sin escobillas PA-14 y PA-14P personalizados (12 o 24 VDC). No es compatible con motores con escobillas estándar.
OPCIONES PERSONALIZADAS
¿Busca un actuador pero las especificaciones no coinciden exactamente con lo que necesita? Contamos con una extensa lista de capacidades de personalización para garantizar que obtenga exactamente lo que necesita para su proyecto. Descargue la hoja de datos de este producto y descubra más sobre sus opciones de personalización.
El controlador de motor de corriente continua sin escobillas LC-241 permite un control total del ciclo de trabajo de un actuador lineal de corriente continua sin escobillas. Al utilizar las entradas de control, el usuario tiene un control total sobre la velocidad y la dirección de un actuador de corriente continua sin escobillas. Nuestros actuadores lineales PA-14 y PA-14P se pueden personalizar para que tengan un motor de corriente continua sin escobillas que funcione con el controlador LC-241.
Utilizando los terminales de tornillo, conecte los actuadores lineales a la caja de control. Aplica entre 12 y 24 VDC en los cables de alimentación y sigue la información de integración del control que se encuentra en el manual del usuario del LC-241.
Es importante asegurarse de que la fuente de alimentación tenga un amperaje nominal suficiente para controlar los actuadores lineales. El LC-241 está diseñado para controlar un actuador lineal de corriente continua sin escobillas de 8 A y 12-24 VDC como máximo.
* Solo compatible con motores sin escobillas PA-14 y PA-14P personalizados (12 o 24 VDC). No es compatible con motores con escobillas estándar.
OPCIONES PERSONALIZADAS
¿Busca un actuador pero las especificaciones no coinciden exactamente con lo que necesita? Contamos con una extensa lista de capacidades de personalización para garantizar que obtenga exactamente lo que necesita para su proyecto. Descargue la hoja de datos de este producto y descubra más sobre sus opciones de personalización.
Seguir un conjunto de estándares es crucial para que las empresas garanticen que sus productos y servicios puedan alcanzar un nivel de calidad que promueva la satisfacción del cliente. En Progressive Automations, nuestro único objetivo es lo mejor para nuestros clientes y nos esforzamos por lograr mejoras continuas. Debido a esto, nos complace anunciar que Progressive Automations ahora cuenta con la certificación ISO 9001:2015.
Calidad en la que puede confiar – Más informaciónHojas de datos

Manual de usuario
Manual de usuario

Cómo cablear un actuador lineal de 12 voltios
El actuador lineal eléctrico más común utilizado en la industria hoy en día es la versión de 12 VCC. La función de un actuador lineal es bastante sencilla; mueve un objeto en un movimiento lineal. Dependiendo de cómo esté cableada la unidad, se puede controlar de muchas maneras diferentes. En este artículo, repasaremos el cableado de un actuador lineal de 12 voltios a un interruptor basculante y una caja de control junto con una comprensión básica de cómo funciona un actuador .

Uso de motores de CC con escobillas o sin escobillas
A diario, las máquinas y los equipos que nos rodean suelen utilizar motores de CC con escobillas ...
Extienda y retraiga continuamente la carrera de un actuador con un motor de CC sin escobillas
Este tutorial le ayudará a comprender los controles de un controlador de motor de CC sin escobill...