Istnieją dwie metody sterowania wieloma siłownikami – równoległa i synchroniczna. Sterowanie równoległe podaje stałe napięcie do każdego siłownika, natomiast sterowanie synchroniczne podaje do każdego siłownika napięcie o zmiennej wartości.
Proces synchronizacji wielu siłowników jest konieczny, gdy wdrażamy dwa lub więcej siłowników, aby poruszały się z taką samą prędkością. Można to osiągnąć dzięki dwóm formom sprzężenia zwrotnego położenia – czujnikom efektu Halla oraz potencjometrom wieloobrotowym.
Niewielkie różnice produkcyjne siłowników skutkują drobnymi różnicami w ich prędkości. Można to skorygować, podając do siłownika napięcie o zmiennej wartości, aby zrównoważyć prędkości dwóch siłowników. Sprzężenie zwrotne położenia jest niezbędne, aby określić, jakie napięcie należy podać na każdy siłownik.
Synchronizacja siłowników jest ważna podczas sterowania dwoma lub większą liczbą siłowników, gdy wymagana jest precyzja. Na przykład w aplikacjach, w których kilka siłowników musi poruszać obciążenie przy zachowaniu równomiernego rozkładu obciążenia na każdy siłownik. Jeśli w takim zastosowaniu użyto by sterowania równoległego, może wystąpić nierównomierny rozkład obciążenia z powodu różnic w prędkości wysuwu, co ostatecznie spowoduje nadmierne obciążenie jednego z siłowników.
Czujnik efektu Halla
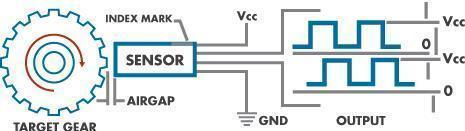
Podsumowując teorię efektu Halla, Edwin Hall (który odkrył efekt Halla) stwierdził, że gdy pole magnetyczne zostanie przyłożone w kierunku prostopadłym do przepływu prądu elektrycznego w przewodniku, indukuje się różnica napięć. To napięcie można wykorzystać do wykrycia, czy czujnik znajduje się w pobliżu magnesu, czy nie. Mocując magnes do wału silnika, czujniki mogą wykryć, kiedy wał jest do nich równoległy.
Za pomocą niewielkiej płytki drukowanej informacje te można wyprowadzić jako przebieg prostokątny, który można zliczać jako ciąg impulsów. Zliczając te impulsy, można śledzić, ile razy obrócił się silnik i jak się porusza.

Niektóre płytki z efektem Halla mają na sobie wiele czujników. Często posiadają 2 czujniki przesunięte o 90 stopni, co daje wyjście kwadraturowe. Zliczając te impulsy i sprawdzając, który pojawia się pierwszy, można określić kierunek obrotu silnika. Można też monitorować oba czujniki i uzyskać więcej zliczeń dla bardziej precyzyjnego sterowania.
Synchronizację na podstawie sprzężenia zwrotnego z czujników efektu Halla można zrealizować za pomocą sterownika Progressive Automations PA-40 Synchronized Dual Hall Effect Actuator Control.
Synchronizacja z użyciem potencjometru
Potencjometry wieloobrotowe, znane także jako reostaty lub rezystory nastawne, dostarczają analogowej reprezentacji położenia siłownika. Czujnik jest zamocowany do układu przekładni połączonego z silnikiem, który obraca potencjometr, a tym samym proporcjonalnie do przebytej drogi siłownika zmienia wartość oporu. Całkowitą zmianę oporu/napięcia można zmierzyć, aby uzyskać zakres pełnej skali wartości analogowej, odpowiadający całkowitemu skokowi siłownika. Potencjometry stosowane w siłownikach Progressive Automations mają 10KΩ.
Na potrzeby synchronizacji odczytuje się wartość analogową każdego potencjometru, którą program/sterownik może wykorzystać do określenia niezbędnego napięcia wyjściowego dla każdego siłownika. Synchronizację z użyciem potencjometru można zrealizować poprzez programowanie mikrokontrolera.
Znaczenie synchronizacji
W tym momencie omówiono metody synchronizacji. Teraz przyjrzyjmy się, dlaczego synchronizacja jest ważna. Gdy celem jest użycie kilku siłowników do pchania lub ciągnięcia obciążenia, musimy zapewnić, że siłowniki będą dokładnie dopasowywać prędkości. Taka precyzja prędkości siłownika jest potrzebna, aby zapewnić równomierny rozkład obciążenia.Przyjrzyjmy się aplikacji, która wymaga siły pchającej 700 funtów i dwóch siłowników. W tym przykładzie użyjemy dwóch siłowników liniowych PA-04 IP-66 o sile 400 funtów każdy, skonfigurowanych z czujnikami efektu Halla do sprzężenia zwrotnego położenia. Łączna dynamiczna siła dwóch siłowników, pracujących synchronicznie, wynosi 800 funtów. System potrzebuje 700 funtów, więc łączna siła 800 funtów będzie akceptowalna dla tego zastosowania.
Ponieważ w tej aplikacji dwa siłowniki podtrzymują wymagane obciążenie, ciężar musi być równomiernie rozłożony na oba siłowniki. Aby zapewnić równy rozkład obciążenia, siłowniki muszą utrzymywać tę samą wysokość — jeśli nie zostanie ona osiągnięta, jeden z dwóch siłowników przejmie dodatkowy ciężar i doświadczy momentu obrotowego (lub obciążenia bocznego). Dodatkowy ciężar i moment mogą przeciążyć siłowniki, co skutkuje ich awarią.
Końcowe elementy wykonawcze
Znaczenie synchronizacji siłowników sprowadza się do zapewnienia jednolitego ruchu wielu siłowników i zapobiegania ich awarii.
Sterownik efektu Halla
Gdy siłowniki są dostosowane za pomocą czujników efektu Halla, do celów synchronizacji można użyć sterownika PA-40.
Mikrokontroler Arduino
Implementację sterowania siłownikiem można zrealizować poprzez programowanie Arduino. Odwiedź poniższe linki, aby dowiedzieć się więcej:
- Kodowanie Arduino
- Synchronizacja z efektem Halla
- Sterowanie pozycją siłownika za pomocą sprzężenia zwrotnego z potencjometru
Jeśli masz jakiekolwiek dodatkowe pytania, nie wahaj się skontaktować z wsparciem inżynieryjnym i uzyskać natychmiastową odpowiedź.