



Como um dos principais especialistas em movimento linear, nós, da Progressive Automations, projetamos, fabricamos e distribuímos uma ampla variedade de atuadores lineares elétricos para praticamente qualquer setor, além de controles e acessórios. Algumas das perguntas comuns que recebemos de quem está entrando no setor são “como funciona um atuador linear?” ou “quais são as partes internas de um atuador linear”. Para responder a algumas dessas perguntas, vamos analisar os componentes do atuador que estão dentro do PA-14 Mini Atuador Linear, pois é uma de nossas unidades mais populares e prontamente disponíveis. Ter mais conhecimento sobre as partes de um atuador linear também pode ajudar a entender melhor como um atuador linear funciona. Isso é útil para ajudar os usuários a saber como selecionar, reparar e solucionar problemas de seus atuadores no futuro.
Componentes principais

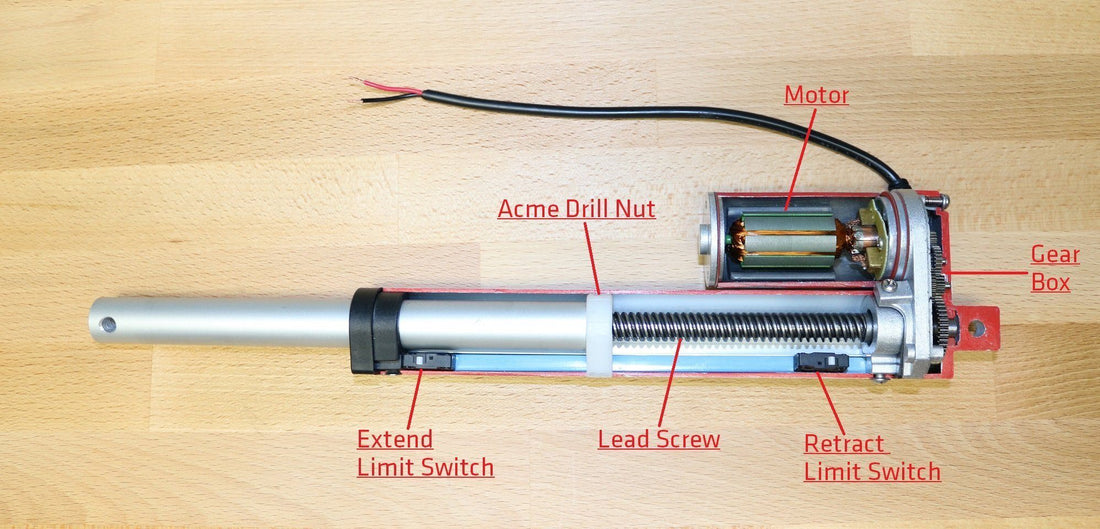
A versão mais prontamente disponível do PA-14 Mini Atuador Linear é acionada por um motor com escovas de 12 VCC; no entanto, este atuador também é oferecido em 24 VCC para certas opções de força e Recorrido. O atuador virá com interruptores de fim de curso integrados no fim do Recorrido para evitar sobreextensão e retração excessiva, um recurso padrão na maioria dos nossos atuadores lineares elétricos. Outros componentes principais do atuador consistem na caixa de engrenagens, no fuso de avanço e na porca de acionamento Acme, que também aciona os interruptores de fim de curso quando atinge determinada posição. O diagrama do atuador linear acima mostra o PA-14 no meio do seu Recorrido, o que significa que ele pode retrair ou estender até atingir os interruptores de fim de curso.
O novo e aprimorado mini atuador PA-01 (upgrade do PA-14) é o modelo atual que oferecemos, com uma variedade de benefícios adicionais. Para comparação, confira as tabelas abaixo e faça o upgrade com confiança!
|
|
PA-01 |
PA-14 |
|
Opções de carga dinâmica |
16, 28, 56, 112, 169, 225 libras |
35, 50, 75, 110, 150 libras |
|
Carga máxima |
225 libras |
150 libras |
|
Velocidade máxima |
3,54 "/seg |
2,00"/seg |
|
Grau de proteção IP |
IP65 |
IP54 |
|
Opções de Recorrido |
1" to 40" |
1" to 40" |
|
Feedback de efeito Hall |
Opcional |
Não |
Fornecimento de energia

Por definição, um atuador linear é um dispositivo que move objetos em uma direção linear. O movimento de rotação é gerado primeiro pelo motor elétrico, muitas vezes na casa dos milhares de rotações por minuto. Esse movimento rotacional de alta velocidade é então reduzido pela caixa de engrenagens para aumentar o torque que será usado para girar o fuso de avanço. As caixas de engrenagens geralmente têm uma relação de redução como “100:1”, o que significa que, a cada 100 rotações do motor, haverá 1 rotação na engrenagem final da caixa de engrenagens que está conectada ao fuso de avanço.
Em seguida, o fuso de avanço gira, resultando no movimento linear da porca de acionamento Acme. Isso é muito semelhante a rosquear um parafuso em um pedaço de madeira. No entanto, em vez de o parafuso se mover em direção à peça de madeira fixa, é o parafuso que está fixo e, portanto, a madeira se moverá em direção ao parafuso ou para longe dele. Os fusos de avanço vêm com uma especificação TPI (voltas por polegada). Por exemplo, um TPI de 15 significa que, a cada 15 voltas do fuso de avanço, a porca de acionamento conectada se moverá uma polegada.
A velocidade do motor, a redução por engrenagem e o TPI do fuso de avanço determinam a velocidade final do atuador linear. Nossos atuadores têm várias opções de força por modelo. Esses modelos geralmente têm o mesmo motor, mas a redução por engrenagem e o TPI mudam. A regra geral é: ao reduzir a velocidade, a força aumenta — e vice-versa.
Recorrido
Uma das adições mais convenientes a um atuador linear são os interruptores de fim de curso integrados no fim do Recorrido. Essencialmente, isso evita que o atuador atinja os limites físicos de movimento da carcaça, o que provavelmente causaria a queima do motor. Também permite uma parada mais suave assim que o fim do Recorrido é alcançado.
O sistema empregado para esses interruptores de fim de curso é muito simples e robusto. A eletricidade da sua fonte de alimentação basicamente vai do conector de entrada do atuador ao motor, passa pelos interruptores de fim de curso e então completa o circuito de volta ao conector, como mostrado no diagrama do atuador linear abaixo.

Os interruptores de fim de curso interrompem o trajeto da eletricidade quando são tocados pela porca de acionamento. Agora, devido ao diodo unidirecional em cada interruptor de fim de curso, a eletricidade só pode fluir em um sentido. Por exemplo, o sentido da eletricidade necessário para estender o atuador será interrompido pelo interruptor de fim de curso de extensão e seu diodo, como visto abaixo.

Diodo impedindo o fluxo de corrente para proteger o atuador de sobreextensão
Entretanto, o diodo permitirá o sentido oposto da eletricidade, que será necessário para retrair o atuador. Assim que o fuso de acionamento se retrair e não estiver mais tocando o interruptor de fim de curso de extensão, a eletricidade voltará a passar pelo interruptor de fim de curso, permitindo movimento em ambas as direções.

Diodo permitindo o fluxo de corrente para retração
Conclusão
Em conclusão, atuadores lineares elétricos podem ser usados em muitas aplicações que exigem movimento linear. Ter mais conhecimento sobre as partes internas de um atuador linear e como os componentes do atuador funcionam permite que os usuários entendam melhor como selecionar e solucionar problemas de seus atuadores no futuro. Para mais informações sobre os componentes de atuadores lineares elétricos, entre em contato conosco pelo telefone 1-800-676-6123 ou envie um e-mail para sales@progressiveautomations.com. Ficaremos felizes em ajudar com quaisquer dúvidas que você possa ter!