
Eficiência, durabilidade e precisão em um formato compacto são características frequentemente muito requisitadas em atuadores lineares elétricos para uso em diversos setores e aplicações com restrições de espaço. Ao escolher os microatuadores e miniatuadores adequados, aplicações com restrições de espaço podem se beneficiar de controle preciso, facilidade de uso e otimização de desempenho.
Esta página é dedicada a explicar os fundamentos dos micro e miniatuadores, as vantagens que oferecem, nossa gama de modelos, especificações críticas e como escolher o mais adequado às suas necessidades específicas de aplicação.
O que são micro e mini atuadores lineares elétricos?
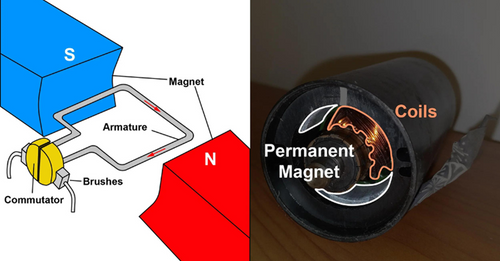
Atuadores São componentes fundamentais em diversos sistemas mecânicos, desempenhando um papel crucial na conversão de energia em movimento. Essencialmente, um atuador utiliza uma fonte de energia, tipicamente elétrica. elétrico, hidráulico ou pneumáticoe o converte em movimento físico. Isso é conseguido através de diferentes componentes e mecanismos que dependem do tipo de atuador.
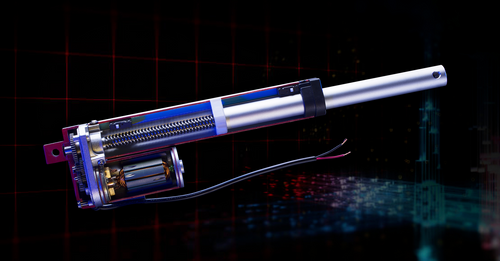
Em atuadores lineares elétricosA corrente elétrica é usada para produzir movimento rotacional em um motor elétrico que está mecanicamente ligado a uma caixa de engrenagens e utiliza um fuso de esferas para acionar o eixo do atuador conectado a um ACME Furadeira com porca para movimento linear. Fuso de esferas Existem também variantes, que oferecem diferentes vantagens e desvantagens para se adequarem a outras aplicações.
Enquanto os atuadores tradicionais podem apresentar um design volumoso, os micro e mini atuadores lineares elétricos são projetados para realizar a mesma função em uma escala muito menor. Esses dispositivos compactos podem ser instalados em espaços reduzidos e são perfeitos para aplicações onde precisão e sutileza são essenciais. Quando escolhidos com um curso longo, a largura e a altura são as principais dimensões que evidenciam o tamanho compacto dos micro e mini atuadores.
Considerando um curso curto de 2 polegadas, a largura e a altura dos microatuadores são mais do que compactas o suficiente para que a unidade caiba na palma da mão. Mini atuadores têm um tamanho maior que microatuadoresEntretanto, os mini atuadores ainda possuem um design compacto, representando aproximadamente metade ou um terço do volume dimensional de atuadores do tipo padrão.

Vantagens dos atuadores lineares elétricos micro e mini

Os micro e mini atuadores lineares elétricos oferecem uma série de vantagens que os tornam indispensáveis na sociedade moderna. Seu tamanho compacto permite a integração em espaços reduzidos, proporcionando controle e movimento precisos onde atuadores maiores não cabem.
O tamanho miniaturizado aumenta a versatilidade e a adaptabilidade dos sistemas com os quais são integrados, além de permitir uma operação com eficiência energética a partir de seus motores menores.
- Tamanho compacto: Sua largura e profundidade significativamente menores permitem um formato que se adapta aos requisitos de aplicação com restrições de espaço rigorosas ou quando se busca maximizar o espaço de armazenamento disponível nos compartimentos.
- Precisão: Projetado com opções para feedback posicional Para lidar com aplicações que exigem precisão, eles proporcionam controle preciso sobre o movimento e possuem uma tolerância de fabricação menor do que atuadores lineares maiores.
- Eficiência: Apesar do tamanho, são energeticamente eficientes, com baixos requisitos de consumo de corrente e interruptores de limite integrados ou baixo consumo de energia em modo ocioso, o que os torna ideais para sistemas portáteis e dispositivos alimentados por bateria.
- Versatilidade: As opções para diversas classificações de força, velocidades, comprimentos de curso, tipos de feedback, operações de tensão e outras especificações personalizáveis permitem que os micro e miniatuadores sejam versáteis e se adaptem a uma variedade de ambientes, desde dispositivos médicos até eletrônicos de consumo.
Como escolher o microatuador ou miniatuador certo para o seu projeto
Na hora de escolher o microatuador ou miniatuador ideal para o seu projeto, alguns pontos-chave devem ser considerados:
- Requisitos de cargaRefere-se à quantidade de força necessária para sua aplicação. Isso influenciará sua escolha do modelo de atuador.
- VelocidadeDependendo da aplicação, você pode precisar de um atuador compacto rápido ou lento. Escolha de acordo com as necessidades da sua aplicação.
- Comprimento do cursoIsso indica a distância que o atuador precisa percorrer. Certifique-se de que o comprimento do curso corresponda aos requisitos de distância de deslocamento do seu projeto.
- Requisitos de energia elétricaOs requisitos de tensão e corrente de cada modelo de atuador podem variar. Considere a tensão e opções de fonte de alimentação Disponível para o seu atuador compacto.
- Resistência ambientalConsidere a sua aplicação e o ambiente para determinar se o seu atuador compacto deve suportar um certo nível de poeira, entrada de líquidos e/ou corrosão.
- Feedback PosicionalDetermine se sua aplicação exigirá um certo nível de precisão de movimento/capacidade de avanço ou se um controle manual básico de avanço e retrocesso será suficiente.
- Compatibilidade do sistema de controle: Escolha sistemas de controle que sejam compatíveis com o(s) atuador(es) compacto(s) escolhido(s). Se você já possui sistemas de controle, certifique-se de que o(s) atuador(es) escolhido(s) seja(m) compatível(is).
Também temos um questionário online com perguntas que podem ajudá-lo a escolher, dentre nossa linha de micro e miniatuadores, o modelo mais adequado às suas necessidades.
Requisitos de carga
Existem alguns fatores envolvidos em encontrar a força certa A capacidade de carga de um atuador é medida pela sua capacidade de suportar os requisitos de carga de uma aplicação. As variáveis podem incluir a carga, o ângulo de aplicação da carga e as dimensões da carga. Os requisitos de carga são medidos pela força necessária para empurrar e/ou puxar diretamente o eixo de um atuador (exemplos de unidades: libras, quilogramas, Newtons).
Velocidade
A velocidade de deslocamento geralmente depende das opções de força nominal para as quais o atuador foi configurado. Alguns modelos vêm com várias opções de força nominal que podem ser selecionadas ao fazer um pedido online. Essas diferentes opções de força nominal têm suas relações de engrenagem internas ajustadas para uma determinada configuração de torque, o que também afeta a velocidade de deslocamento do atuador. A velocidade de um atuador é medida pela distância percorrida em um determinado período de tempo (exemplo: polegadas/segundo, mm/segundo).
Comprimento do curso
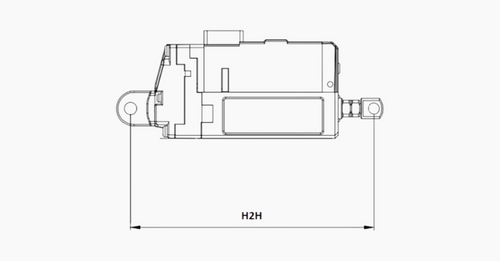
A distância entre furos (H2H) de um atuador, medida do centro do furo de montagem traseiro ao centro do furo de montagem dianteiro, é afetada pelo comprimento do curso. Isso ocorre porque um curso mais longo exige um atuador com um corpo mais longo para acomodar o eixo interno. O comprimento do curso pode ser calculado subtraindo-se a distância H2H totalmente fechada da distância H2H totalmente aberta do atuador (exemplo de unidades: polegada ou mm).
Requisitos de energia elétrica
Uma aplicação pode vir com uma fonte de energia elétrica pré-existente ou ter uma fonte de alimentação recém-instalada com determinadas especificações e requisitos de energia elétrica. Verifique as especificações de tensão (VCC ou VCA) e corrente (Ampere ou A) da(s) fonte(s) de alimentação e do(s) atuador(es) para verificar se estão dentro da faixa adequada. A regra geral é que a fonte de alimentação precisa ter uma capacidade de corrente superior à soma da corrente máxima exigida por todas as unidades conectadas a ela.
Resistência ambiental
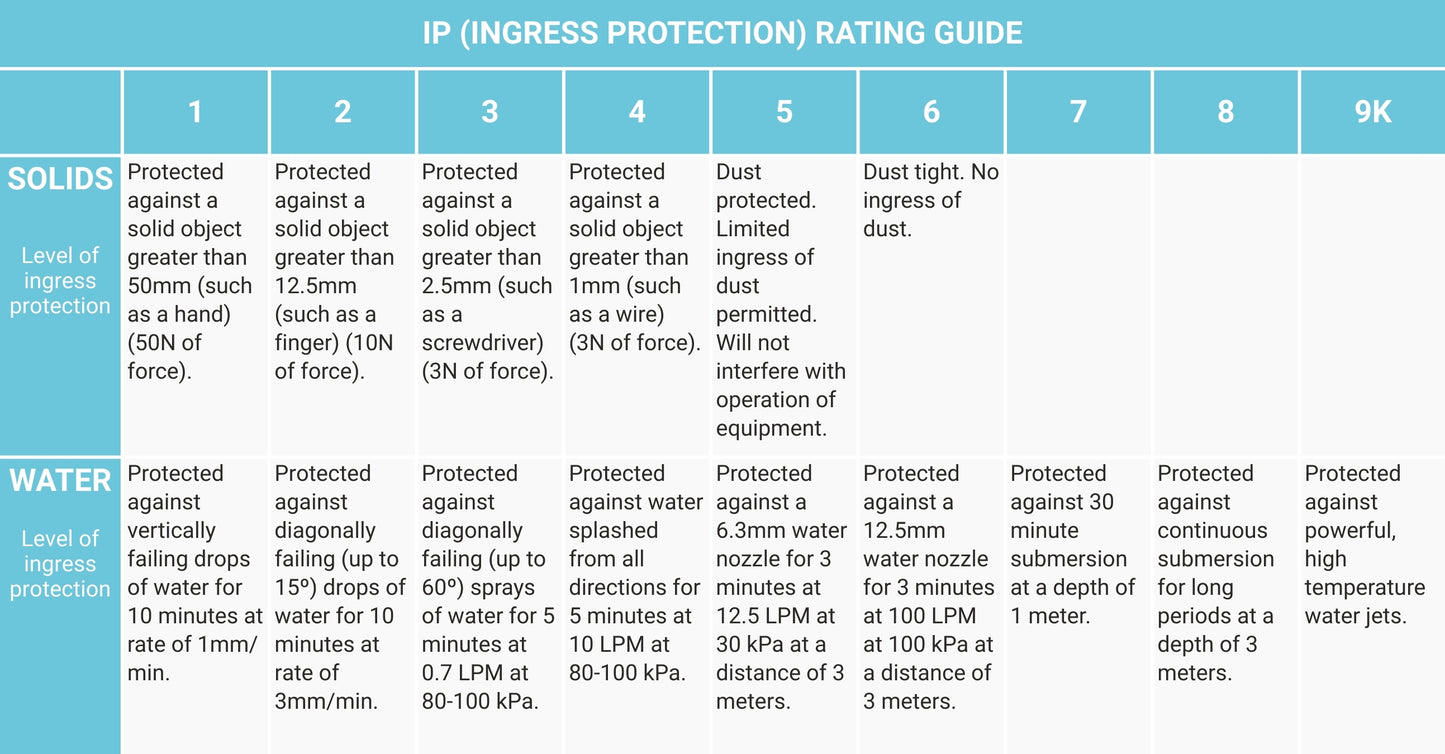
Proteção contra ingresso (IP) O sistema de classificação utiliza um sistema de dois dígitos para definir o grau de proteção de todos os produtos. O primeiro dígito representa a proteção contra sólidos e o segundo contra líquidos. O Código IP foi desenvolvido para padronizar os graus de proteção e limitar interpretações errôneas/representações equivocadas da capacidade de proteção de um produto. Classificação de névoa salina É crucial para a proteção contra a corrosão que pode ocorrer devido ao sal em estradas, praias, água salgada, etc.
Feedback Posicional
Dispositivos de feedback posicional integrados, como codificadores, sensores de efeito HallPotenciômetros, etc., são usados para transmitir sinais que serão lidos por um controlador para determinar a posição do curso do atuador. Isso permite recursos como múltiplos atuadores que podem se deslocar simultaneamente na mesma velocidade. movimento síncrono, predefinições de memória e/ou exibição posicional.
Compatibilidade do sistema de controle

Verifique se o seu atuador possui protocolos de comunicação/Feedback posicional correspondentes aos controladores que você estava considerando. Por exemplo, os Atuadores servo micro de precisão PA-12-T (TTL/PWM) e PA-12-R (RS-485) fornecem controle de posição preciso com precisão posicional de até 100 um e exigem protocolos de comunicação avançados para esse desempenho.
Outra coisa a considerar é se o tipo de motor do seu atuador será compatível com um sistema de controle. Motores sem escovas de operação contínua, como os encontrados nos nossos atuadores PA-14 feitos sob encomenda, exigiriam caixas de controle compatíveis com sua operação, como a caixa de controle LC-241.
Para ver quais das nossas caixas de controle e dos nossos atuadores são compatíveis entre si, confira nossa comparação e nossas tabelas de compatibilidade.
Funções Programáveis
As caixas de controle, como a nossa série FLTCON, permitem programar funções, recursos de segurança e outras configurações do usuário, acessíveis através da conexão. controle remotoQuando vários atuadores do tipo efeito Hall são conectados a uma caixa de controle FLTCON, a caixa de controle garante a sincronização dos motores para que se movam juntos à mesma velocidade.
Controles manuais básicos
Considere se havia alguma restrição orçamentária para o projeto e escolha um sistema de controle que ofereça o melhor custo-benefício, atendendo aos seus requisitos de desempenho. Por exemplo, projetos simples para ambientes internos que não exigem alta precisão funcionariam sem problemas com um sistema de controle. Como instalar um interruptor basculante básico sem alta proteção contra entrada de água para controlar um microcontrolador de 2 fios ou mini atuador linear a um preço acessível.

Especificações técnicas de micro e miniatuadores
Após a confirmação das especificações e características necessárias para uma determinada aplicação, o próximo passo é analisar os modelos disponíveis para determinar qual oferece as especificações mais adequadas às suas necessidades. Os microatuadores possuem algumas especificações semelhantes às dos miniatuadores; no entanto, a diferença mais notável entre as duas categorias geralmente reside na faixa de força nominal.
Classificações de força
Os microatuadores podem ter capacidades de força dinâmica que variam de 1,34 a 39 libras e capacidades de força estática de 0,67 a 56 libras. Os miniatuadores podem ter capacidades de força dinâmica e estática que variam de 16 a 450 libras.
| Classificação de força (Micro) | PA-MC1 | PA-07 | PA-12-T | PA-12-R |
|---|---|---|---|---|
| Dinâmico | 8 - 39 libras | 5 libras | 1.34 - 2,69 libras | 3.82 - 22,48 libras |
| Estático | 8 - 56 libras | 6,5 libras | 0.67 - 2,69 libras | 1.57 - 22,48 libras |
| Classificação de força (mini) | PA-01 | PA-09 | PA-10 | PA-14 |
| Dinâmico | 16 - 225 libras | 330 libras | 450 libras | 35 - 150 libras |
| Estático | 16 - 225 libras | 330 libras | 450 libras | 35 - 150 libras |
Comprimentos de curso
Os microatuadores têm um curso que varia de 0,5 a 12 polegadas, enquanto os miniatuadores podem variar de 1 a 40 polegadas. Além do comprimento, as dimensões físicas dos microatuadores, como largura e altura, também são mais compactas em comparação com os miniatuadores.

Velocidades
A velocidade dos microatuadores pode variar entre 0,24"/s e 2,67"/s com carga máxima e entre 0,30"/s e 3,15"/s sem carga. Os miniatuadores podem variar entre 0,16"/s e 2,95"/s com carga máxima e entre 0,28"/s e 3,54"/s sem carga.
| Velocidade (Micro) | PA-MC1 | PA-07 | PA-12-T | PA-12-R |
|---|---|---|---|---|
| Sem carga | 0.31 - 1.85"/sec | 0.59"/sec | 0.47 - 1.42"/sec | 0.30 - 3.15"/sec |
| Carga completa | 0.24 - 1.18"/sec | 0.55"/sec | 0.35 - 0.99"/sec | 0.25 - 2.67"/sec |
| Velocidade (Mini) | PA-01 | PA-09 | PA-10 | PA-14 |
| Sem carga | 0.28 - 3.54"/sec | 0.39"/sec | 0.28 - 0.56"/sec | 0.37 - 2.00"/sec |
| Carga completa | 0.20 - 2.95"/sec | 0.27"/sec | 0.16 - 0.33"/sec | 0.28 - 1.38"/sec |
Feedback posicional
O feedback posicional e as opções de protocolo de comunicação disponíveis para micro atuadores incluem TTL/PWM (PA-12-T) e RS-485 (PA-12-R), enquanto os mini atuadores contam com opções como sensores de efeito Hall (PA-09 & PA-10) e feedback de potenciômetro integrado (PA-14).
Cada atuador em estoque pode incluir apenas um tipo de feedback posicional ou protocolo de comunicação. O tipo de feedback posicional escolhido para um atuador afetará sua compatibilidade com sistemas de controle existentes. Pedidos personalizados para certos modelos podem incluir opções como feedback de fim de curso.
Tensão de operação
A principal opção de tensão padrão para todos os nossos mini e micro atuadores é 12 VCC para seus motores CC com escovas. Há opções de 24 VCC para todos os mini atuadores, enquanto os micro atuadores oferecem 7,4 VCC como opção para o PA-12-T. Escolher uma opção de tensão mais alta tende a resultar em menor consumo de corrente para o mesmo modelo.
Consumo de corrente
Os micro atuadores têm consumo de corrente que varia de 200 mA a 2,3 A em carga total e de 30 mA a 200 mA sem carga. Os mini atuadores consomem entre 2 A e 6 A em carga total e entre 500 mA e 1,5 A sem carga.
Para comparar nossos diferentes modelos de micro e miniatuadores, compilamos uma tabela comparativa de atuadores de referência.
Como montar micro e mini atuadores lineares elétricos

A maneira mais simples de garantir que você tenha os suportes de montagem corretos para o seu atuador linear é obtê-los do fabricante original do atuador e verificar a compatibilidade. Para mais informações, disponibilizamos nossa tabela de compatibilidade de suportes de montagem e descrições de produtos em cada um de nossos atuadores.
Outros fabricantes também podem ter fontes semelhantes; no entanto, você também pode entrar em contato com o nosso atendimento ao cliente conforme necessário. Em certos casos, usuários com requisitos especiais ou aplicações específicas podem considerar fabricar seus próprios suportes sob medida de acordo com as medidas, o design e o formato necessários. Confira nossos desenhos 3D de atuadores como referência adicional.
Igualmente importante a obter suportes de montagem compatíveis para seus micro e miniautuadores elétricos é selecionar o processo de montagem com o método adequado para sua aplicação. Abaixo estão dois métodos comuns usados para montar um atuador linear elétrico.
- Montagem de pivô duplo
- Montagem estacionária
Montagem de pivô duplo

A montagem com pivô duplo é um método que consiste em fixar um atuador em ambos os lados com um ponto de montagem que permite a rotação livre, geralmente um pino de fixação ou um garfo. Essa montagem permite que o atuador gire em ambos os lados durante a extensão e retração, possibilitando um movimento de trajetória fixa com dois pontos de pivô livres.
Um exemplo de aplicação desse método é abrir e fechar automaticamente. portas do galinheiroQuando o atuador se estende, os dois pontos de fixação permitem que a porta se abra. O movimento de abertura e fechamento da porta causa mudanças de ângulo, mas o pivô proporciona espaço suficiente para a rotação dos dois pontos de fixação. Ao usar este método, certifique-se de que haja espaço suficiente para a extensão do atuador, sem obstáculos em seu caminho.
Montagem fixa
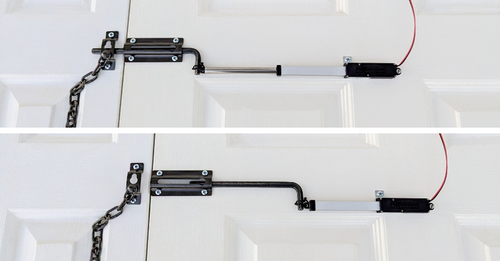
No método de montagem estacionária, o eixo pode se estender e retrair da carcaça em linha reta, enquanto o restante do atuador permanece montado em uma posição fixa. Um suporte de montagem para a carcaça do eixo pode ser utilizado para auxiliar na manutenção do alinhamento ideal do atuador na superfície de montagem.
Esse tipo de montagem é comumente usado para realizar ações como empurrar e puxar um acessório frontalmente. Por exemplo, essa forma de montagem é ideal para empurrar e puxar um trinco de porta de correr Para trancar e destrancar uma porta. Ao optar por este método, certifique-se de que o dispositivo de montagem suporte a carga aplicada pelo atuador.
Aplicações de micro e miniatuadores
A versatilidade dos micro e mini atuadores compactos, com sua operação eficiente, construção durável, opções de personalização e especificações de alto desempenho, abre um mundo de possibilidades infinitas. Aqui estão alguns exemplos de aplicações e setores em que são utilizados:
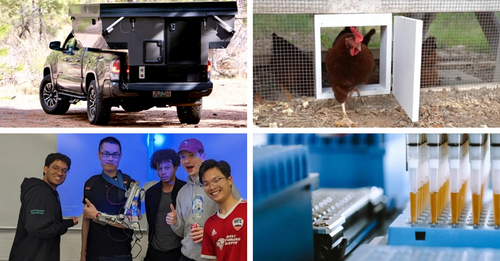
- Automação residencialA conveniência e a segurança adicionais de ter fechaduras de segurança para portas, pérgolas motorizadas com cobertura de venezianas, portas automáticas, e projetos de entrada oculta Essas são apenas algumas das áreas da casa que se beneficiam de atuadores micro e mini compactos. Sua eficiência em termos de espaço, baixa necessidade de manutenção e operação simples os tornam populares tanto no uso comercial quanto entre os entusiastas do "faça você mesmo" em suas residências.
- Projetos personalizados/faça você mesmoEm muitos casos, prototipagem um novo produto ou criação versões em pequena escala É uma etapa crucial no processo de identificação de potenciais desafios que precisam ser abordados antes de prosseguir com um projeto finalizado. Micro e miniatuadores, com seu corpo compacto e especificações versáteis, ajudam a gerar movimento para demonstrar uma prova de conceito, simulando assim um projeto em escala real.
- Indústrias médicas: No campo médico, precisão O controle de microatuadores é crucial para equipamentos projetados para lidar com fluxo de fluidos, acionar robôs cirúrgicos ou posicionar equipamentos médicos. Camas ajustáveis, cadeiras, equipamentos de reabilitação e equipamentos de imagem podem incorporar miniatuadores para proporcionar movimentos silenciosos e suaves. ambientes hospitalares.
- Indústrias automotivasOs casos de uso incluem a abertura compartimentos de armazenamento, criando campistas, inclinação dos espelhos, ajustes dos vidros e automatização das conversões do teto. A combinação das vantagens dos micro e miniatuadores ajuda a melhorar a experiência de condução e propriedade do usuário sem ocupar muito espaço, graças ao seu formato compacto.
- Indústria do entretenimentoParques de diversões e fantasias de Halloween utilizam animatrônicos, robôs de cinemae efeitos especiais que cativam o público com movimentos realistas. Isso é possível graças à ampla variedade de configurações disponíveis em micro e miniatuadores, que atendem às exigências de espaço limitado, níveis de força necessários e ambientes externos, mantendo a eficiência energética.
O futuro dos micro e mini atuadores lineares elétricos
Embora os micro e mini atuadores lineares elétricos possam não receber tanta atenção no mundo da tecnologia, eles desempenham um papel crucial na expansão dos limites do que é possível. À medida que a tecnologia avança, a demanda por componentes menores e mais eficientes continuará a crescer.
Seja para projetar o próximo dispositivo revolucionário ou desenvolver equipamentos médicos de ponta, os micro e miniatuadores têm um futuro promissor e podem ser as soluções compactas que você nem sabia que precisava.
Aprimoramentos de Materiais
Os materiais desempenharão um papel fundamental na melhoria do desempenho e da durabilidade dos atuadores. O desenvolvimento de compósitos avançados permitirá a criação de atuadores mais leves e resistentes, capazes de suportar cargas maiores e operar em ambientes mais extremos. Esses materiais também contribuirão para a redução do tamanho geral dos atuadores, sem comprometer a integridade estrutural e a potência de saída.
Melhor desempenho
O desempenho geral dos mini e microatuadores deverá ser aprimorado, com foco no aumento da relação força/tamanho. Isso será alcançado por meio da integração de motores de alta eficiência e sistemas de engrenagens otimizados, permitindo maior precisão e controle. Além disso, a miniaturização dos componentes possibilitará que atuadores compactos sejam instalados em espaços cada vez menores, ampliando seu escopo de aplicação.
Melhorias na precisão
A precisão do feedback posicional deverá apresentar melhorias substanciais com a incorporação de tecnologias de sensores avançadas. O uso de encoders ópticos, sensores de efeito Hall e outros mecanismos de feedback de alta resolução em desenvolvimento proporcionará um controle preciso sobre o movimento do atuador. Isso será crucial em aplicações onde o posicionamento exato é crítico, como em robôs cirúrgicos ou equipamentos de fabricação de precisão.
Resumindo
Os micro e miniatuadores são componentes versáteis que otimizam aplicações com restrições de espaço, maximizando seu potencial graças à sua durabilidade, eficiência e precisão. Ao compreender os diferentes tipos de micro e miniatuadores, suas especificações e o processo de seleção dos modelos adequados, os usuários podem garantir o funcionamento ideal e alcançar os resultados que atendam às necessidades de sua aplicação.
Esperamos que tenha achado este conteúdo tão informativo e interessante quanto nós, especialmente se estava procurando orientações para escolher atuadores lineares elétricos micro e mini adequados para sua aplicação. Caso tenha alguma dúvida sobre nossos produtos ou esteja com dificuldades para selecionar os atuadores lineares elétricos ideais para suas necessidades, entre em contato conosco! Somos especialistas no assunto e teremos prazer em ajudar com qualquer pergunta que você possa ter!
Os miniatuadores têm um tamanho maior do que os microatuadores; no entanto, ainda possuem um design compacto, representando aproximadamente metade ou um terço do volume dimensional dos atuadores de tipo padrão.
Nossos microatuadores estão disponíveis com comprimentos de curso que variam de 0,5 a 12 polegadas, enquanto nossos miniatuadores variam de 2 a 40 polegadas.
Os requisitos de tensão dos nossos atuadores variam de modelo para modelo; no entanto, a maioria dos nossos modelos possui opções ou vem de fábrica com operação em 12 VDC.
A classificação IP dos nossos atuadores varia de modelo para modelo; no entanto, os micro e mini atuadores podem variar de IP54 a IP66.
O movimento síncrono de múltiplos atuadores é possível quando os atuadores possuem feedback posicional integrado, como sensores de efeito Hall, emparelhados com caixas de controle de efeito Hall compatíveis e programadas para mantê-los sincronizados.