
Včasih želite objekt premakniti na večjo razdaljo, kot je dolžina Hoda aktuatorja. To lahko dosežete s teleskopskim aktuatorjem ali pa v svoj prid izkoristite fiziko mehanskega vzvoda. Pogosti primeri so škarjasto dvigalo ali pa to, kar je naš prijatelj Mike Senna, ustvarjalec robota Wall-E, naredil s svojim DIY samodejnim odpiračem vrat za kokošnjak.
Mehanski vzvod
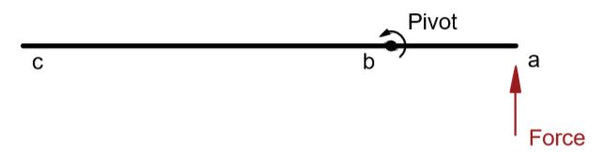
Fizika za temi primeri uporabe temelji na razmerju razdalj od vrtišča na vsaki strani. Kot lahko vidite na sliki 1, je aktuator nameščen v točki »a«, fiksno vrtišče pa je v točki »b«. Če vzamete razmerje med »B« in »A«, dobite razmerje »R«. To pomeni, da se bo točka »c« zavrtela R-krat več, kot je Hod aktuatorja. Vendar se bosta pri tem potrebna sila aktuatorja in vrtilna hitrost točke »c« povečali za R-krat. To je načelo, kako izkoristiti linearni aktuator glede na njegov Hod in mesto, kjer ga namestite.
DIY samodejni odpirač vrat za kokošnjak
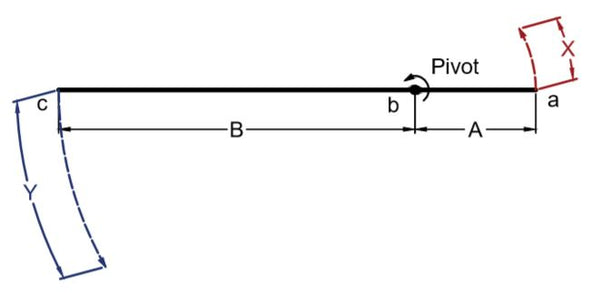
Aplikacija Mika Senne uporablja isto načelo, opisano zgoraj, in je lep primer dodajanja še enega člena, ki vrtenje točke »c« pretvori v linearno gibanje. Na sliki 2 lahko vidite, da se zgornji člen vrti okoli vrtišča, aktuator pa potiska v točki »a«.
Slika 2: Zgornji člen, ki se vrti okoli vrtišča v točki b
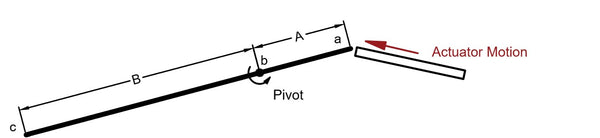
Mike je vedel, da mora vrata kokošnjaka odpreti približno 18 in palcev. Da bi razmerje »R« nastavil na tri in s tem zagotovil, da bi točka »c« prepotovala 18 in palcev s 6-palčnim Hodom, je vrtišče postavil ¾ proti točki »a« (slika 3). Mike je to dosegel tako, da je roko pozicioniral tako, da je bilo na eni strani vrtišča 3.5 in palcev, na drugi strani pa 10.5 in palcev (3.5 in palcev × 3).
Slika 3: Zgornji člen, ki se vrti okoli vrtišča v točki b z dimenzijami
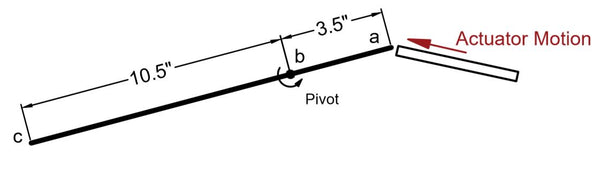
Po tem je Mike dodal še en člen, da je vrtilno gibanje pretvoril v linearno. Pojasnjuje: »Moja rešitev je bila dodati še eno roko, katere namen je kompenzirati lok, saj se en konec giblje po loku, drugi konec pa se prilagaja linearnemu gibanju.« Slika 4 je shema, izdelana za njegov projekt DIY samodejnega odpirača vrat za kokošnjak, prikazana v različnih položajih vzdolž njegovega hoda. Upoštevajte, da se bosta hitrost vrat kokošnjaka in sila, ki jo aktuator aplicira, skozi hod spreminjali. Nato je bilo le še vprašanje prilagajanja pozicioniranja, da je dosegel želeni hod vrat.
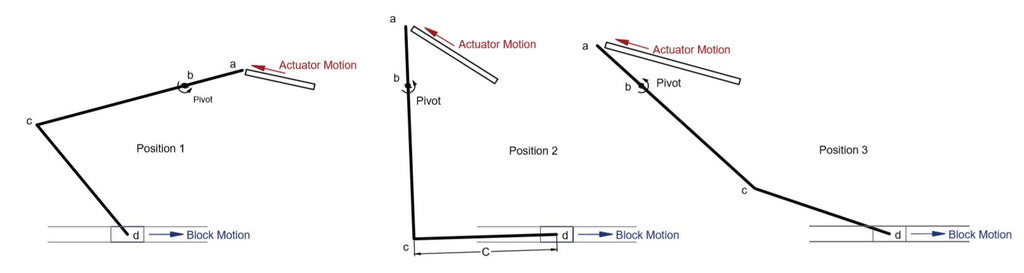
Slika 4: Vrata kokošnjaka v treh različnih položajih
Škarjasto dvigalo
Škarjasto dvigalo je še en primer uporabe tega načela, s katerim se z mehanskim vzvodom doseže več linearnega gibanja. Da bi prikazali, kako izkoristiti linearni aktuator, je bil ustvarjen 3D-model z aktuatorjem za škarjasto dvigalo, ki simulira večji pomik platforme z relativno krajšim gibanjem aktuatorja.
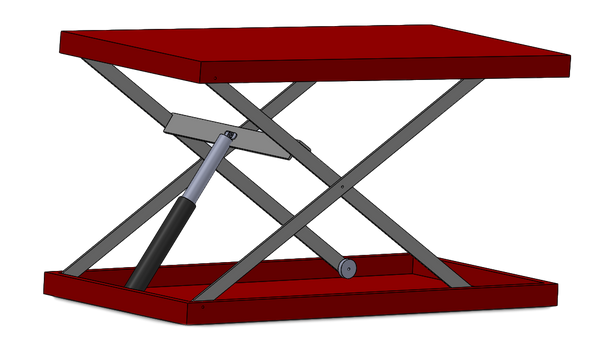
Slika 5: 3D-model enostopenjskega škarjastega dvigala
Kot lahko vidite na sliki 5, je bil za škarjasto dvigalo uporabljen aktuator z relativno kratkim Hodom (8 in palcev v tem primeru), da je dvignil na višino 36 in palcev. Škarjasta dvigala delujejo po istem načelu, kjer se telo vrti okoli vrtišča in se ustvari mehanska prednost. Vendar namesto dodajanja še enega člena, katerega namen je preprosto prevesti vrtilno gibanje enega konca, je gibanje koncev členov omejeno na vodoravno smer. Posledično je smer sile samo navzgor.
Zanimivo pri škarjastem dvigalu je, da se dvigalo dviguje, ko se aktuator izteka, če je aktuator nameščen v zgornji polovici. Če pa je aktuator nameščen v spodnji polovici, se dvigalo dviguje, ko se aktuator vrača. Upoštevajte tudi, da bolj kot je aktuator nameščen blizu srednjega zgloba členov, višje se bo dvignilo, vendar bo aktuator potreboval več sile.
Če raziskujete, kako z mehanskim vzvodom izkoristiti linearni aktuator za premik predmeta na daljšo razdaljo, bosta teleskopski aktuator ali DIY mehanizem škarjastega dvigala povsem ustrezna. Za aktuator za škarjasto dvigalo ali vratni mehanizem ima Progressive Automations na zalogi različne modele z različnimi Hodi in silami, ki pokrijejo vse vaše DIY potrebe.