Les simulateurs de mouvement sont des atouts essentiels pour l’analyse d’ingénierie, la formation, l’éducation et le divertissement, car ils recréent une sensation réaliste de déplacement. Les vérins linéaires sont une solution prisée pour actionner des opérations mécaniques en raison des avantages significatifs qu’ils offrent ; toutefois, les simulateurs de mouvement peuvent les intégrer de nombreuses manières pour une grande variété d’usages. Dans cet article, nous présenterons quelques exemples de simulateurs de mouvement afin de mieux comprendre comment simulateurs de mouvement et vérins linéaires fonctionnent ensemble.
Cas d’usage
Il existe de nombreuses façons d’intégrer des vérins linéaires électriques dans des simulateurs de mouvement. Pour ne citer que quelques exemples, des vérins ont été utilisés pour générer le mouvement linéaire présent dans :
- des simulateurs de vol
- des simulateurs de véhicules militaires
- des attractions de parcs à thème
- des simulateurs de conduite/de course
- des simulateurs de vaisseaux spatiaux
- des plates-formes Stewart
- divers jeux vidéo d’arcade
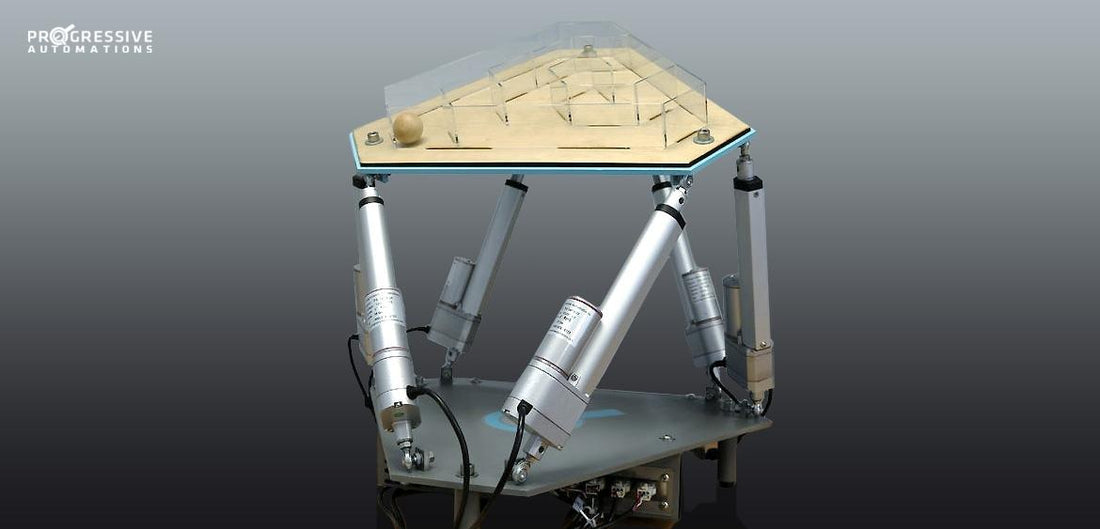
Plate-forme six axes utilisant des vérins linéaires (plate-forme Stewart)

Fièrement sponsorisée par Progressive Automations, la plate-forme Stewart du département d’ingénierie physique de l’UBC offre une expérience intéressante et interactive pour apprendre la commande du mouvement linéaire ainsi que la physique impliquée en robotique.
En intégrant nos vérins linéaires à Rétroaction PA-14P, les informations de position peuvent être lues via des signaux de Rétroaction provenant des potentiomètres intégrés au vérin. Disposer d’informations de position permet au système de vérifier si les vérins ont atteint précisément les positions requises, afin de minimiser les erreurs et d’améliorer la répétabilité. Bien que des dispositifs tels que les capteurs à effet Hall et les accéléromètres puissent offrir une précision accrue, leur intégration est plus complexe, tandis que la Rétroaction par potentiomètre offre une précision suffisante avec une intégration plus simple. Par ailleurs, les modèles PA-14P-6-35 proposaient une Vitesse (2,00"/s à vide) et un format compact adaptés à cette application nécessitant une longueur de Course de 6".

Le LC-062 microcontrôleur Arduino Due interface les six vérins, ainsi que deux shields Arduino MultiMoto, au PC hôte via une connexion série USB. Étant donné que nos cartes Multimoto pouvaient gérer au maximum quatre canaux contrôlés indépendamment en même temps, les six vérins linéaires requis pour le projet ont été répartis à raison de trois par carte. Les mouvements des vérins ont ensuite été gérés par un système de Rétroaction PID utilisant les mesures des potentiomètres des PA-14P comme entrées.

Avec l’interface graphique (GUI) personnalisée, un contrôleur Leap Motion utilisant trois émetteurs IR et deux caméras permet aux utilisateurs de piloter entièrement les mouvements de la plate-forme d’un simple geste de la main. Pour une présentation détaillée de la plate-forme Stewart, nous avons inclus le rapport de projet et les liens GitHub.
https://content.instructables.com/ORIG/FQC/KXUA/JIYU1JDE/FQCKXUAJIYU1JDE.pdf
https://github.com/progressiveautomations/Stewart-Platform
La technologie derrière les plates-formes Stewart est utilisée dans de nombreux simulateurs de mouvement modernes grâce à leurs 6 degrés de liberté (trois pour la position, trois pour l’orientation), soit le nombre maximal de degrés de liberté d’un corps rigide. Un exemple à plus grande échelle est visible avec le simulateur de mouvement Cruden HexaPod, qui exploite ses six degrés de liberté pour permettre des simulations d’une précision et d’une répétabilité maximales.

Simulateur de vol utilisant des vérins linéaires

À mesure que la technologie progresse, les simulateurs de mouvement deviennent progressivement plus abordables pour les fabricants DIY du monde entier. Un exemple notable est le projet de simulateur de vol de notre client Anthony Escalante. Grâce à sa conception modulaire de composants fabriqués sur mesure, de matériel électronique et de programmation, Anthony a créé un simulateur de vol dynamique entièrement fonctionnel pour son domicile.
Conçu avec plusieurs PA-03 et PA-04 vérins linéaires standard, le système d’Anthony offre 6 degrés de liberté, similaire à la plate-forme Stewart mentionnée précédemment. Chacun de nos vérins linéaires standard présentait la Vitesse et la force nécessaires pour gérer en douceur les inclinaisons, rotations et virages afin de simuler un vol réel via la plateforme de mouvement d’Anthony.

Accompagné de quatre alimentations, le système de contrôle dispose d’un tirage de Courant suffisant pour intégrer les pilotes de Moteur et les microcontrôleurs, soigneusement rangés dans le hub de commande du simulateur.
« Il fonctionne vraiment en douceur et est facile à entretenir, » déclare Anthony. « Je me suis assuré qu’il soit modulaire pour la maintenance. Les pièces étaient facilement disponibles dans les magasins de bricolage et les pièces métalliques achetées et découpées chez Metal Mart. Les vérins et la suspension sont faciles à remplacer. Pas de casse-tête ni d’arrêt prolongé. Ma grand-mère pourrait même le faire elle-même ».

Les vérins linéaires à rail comme les PA-18 et PA-08 sont d’excellentes alternatives pour des simulateurs de mouvement en intérieur qui nécessitent des solutions de longueur compacte en position sortie comme rentrée. En effet, les vérins linéaires à rail ont une plage de mouvement confinée dans le chemin prédéfini du rail, au lieu d’un arbre qui dépasse à l’air libre.
Simulateur de biplan pour enfants

Les simulateurs de mouvement sont également utilisés à des fins de divertissement, comme le simulateur de biplan pour enfants de l’EAA 485. Ce projet modernise le simulateur original à 3 axes provenant d’un chapitre frère à Wetumpka, AL. John McKiernan, président de l’EAA 485, est heureux de partager son projet avec nous !
Le simulateur de biplan nécessitait une Course de 4" sur les axes de roulis et de tangage, et comme l’axe de lacet était sur une platine tournante, déplacer le point d’attache pouvait augmenter ou diminuer le mouvement de lacet. Fort de son expérience préalable avec nos produits, McKiernan a pu déterminer que le vérin PA-03 24 VDC, 200 lb avec une Course de 4" était le modèle approprié.
« Il a fallu moins d’une journée pour le régler et faire fonctionner l’axe de lacet. J’ai ensuite acheté 3 vérins identiques supplémentaires pour en avoir un de rechange. Pour rendre le roulis et le tangage opérationnels, il a fallu usiner 4 blocs d’aluminium afin de permettre l’installation d’un roulement Heim. Les rotules Heim étaient nécessaires pour absorber un certain mouvement axial dans l’actionnement du roulis et du tangage. Ces pièces ont été faites à la main et semblaient très bien fonctionner. Plus tard, un nouveau panneau de fusibles a été réalisé avec des fusibles à lame standards, un pour chaque vérin, un compteur Hobbs et le cockpit. Le cockpit dispose de véritables instruments d’avion et d’un très astucieux son de moteur radial, contrôlé via une manette des gaz. Il utilise des testeurs de servos de radiocommande reliés à un module et à un petit haut-parleur central derrière le tableau de bord. Il y avait même un son de mitrailleuse réaliste lorsqu’on appuyait sur un bouton », explique McKiernan.
McKiernan poursuit : « Les commutateurs d’origine utilisaient un galet à ressort qui, lorsque le manche ou les pédales étaient au neutre, se trouvait dans un bloc phénolique, et le déplacement du manche ou des pédales de gouvernail l’amenait sur une plaque de commutateur en aluminium. Je n’aimais pas que le manche assure le chemin électrique, bien que les blocs phénoliques aient isolé la zone sous le siège. Ceux-ci ont été fixés sur une plaque en aluminium inversée et adaptés chacun sur la structure inférieure existante du commutateur d’origine. »
La bille repose en position centrale du commutateur à l’état neutre et, lorsqu’on déplace le manche ou les pédales, elle fait rouler le galet et actionne le commutateur. Le système de roulis, à l’origine de forme circulaire, a demandé un peu plus de réglage fin car le bloc a dû être ajusté pour adapter le commutateur à la base. Malgré quelques défis, le simulateur de biplan a fait voler 36 enfants lors de sa première sortie au KJKA AOPA, et McKiernan a été très satisfait du résultat.
Des projets comme celui-ci, qui utilisent des interrupteurs comme commandes, sont plus simples à intégrer pour les débutants, sans nécessiter de programmation. Nos micro-vérins linéaires offrent un format compact, parfait pour réaliser des prototypes ou des répliques miniatures de simulateurs de mouvement similaires. Disposer d’une preuve de concept à présenter peut aider à révéler certains obstacles que le projet pourrait rencontrer avant d’aborder le simulateur de mouvement en grandeur réelle.
EN RÉSUMÉ
Les simulateurs de mouvement existent sous de nombreuses formes et tailles, ce qui les rend adaptés pour simuler divers scénarios spécifiques d’application. Des dispositifs tels que microcontrôleurs, interrupteurs et pilotes de Moteur sont fréquemment intégrés avec des vérins linéaires pour permettre aux simulateurs de mouvement de reproduire le mouvement aussi fidèlement que possible.
Nous espérons que vous avez trouvé cet article aussi instructif qu’intéressant, notamment si vous souhaitiez comprendre comment les simulateurs de mouvement et les vérins linéaires fonctionnent ensemble ! Si vous avez des questions ou souhaitez discuter davantage de nos produits, n’hésitez pas à nous contacter ! Nous sommes experts dans notre domaine et serons ravis de vous aider de toutes les manières possibles.
sales@progressiveautomations.com | 1-800-676-6123