
Il peut arriver que vous souhaitiez déplacer un objet sur une distance plus longue que la longueur de course de l’actionneur. Vous pouvez y parvenir en utilisant un actionneur télescopique ou en tirant parti de la physique de l’effet de levier mécanique. Des exemples courants sont la table élévatrice à ciseaux ou ce que notre ami Mike Senna, le créateur du robot Wall‑E, a réalisé avec son ouvre-porte automatique de poulailler DIY.
Effet de levier mécanique
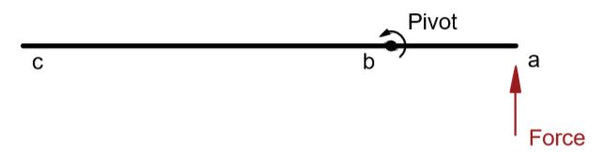
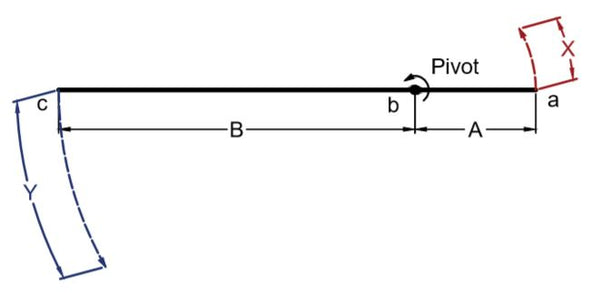
Le principe physique derrière ces applications consiste à utiliser un rapport des distances par rapport au point de pivot de chaque côté. Comme on le voit à la figure 1, l’actionneur est monté au point ‘a’ avec un pivot fixe au point ‘b’. En prenant le rapport de ‘B’ et ‘A’, on obtient un rapport ‘R’. Cela signifie que le point ‘c’ subira une rotation ‘R’ fois supérieure à la course de l’actionneur. Cependant, la force requise par l’actionneur et la vitesse de rotation du point ‘c’ augmenteront d’un facteur ‘R’. C’est le principe pour tirer parti d’un vérin linéaire en fonction de sa longueur de course et de l’endroit où vous le montez.
Ouvre-porte automatique de poulailler DIY
L’application de Mike Senna utilise le même principe décrit ci-dessus et fournit un excellent exemple d’ajout d’un autre bras pour convertir la rotation du point ‘c’ en mouvement linéaire. On voit à la figure 2 que le bras supérieur pivote autour du point de pivot et que l’actionneur pousse au point ‘a’.
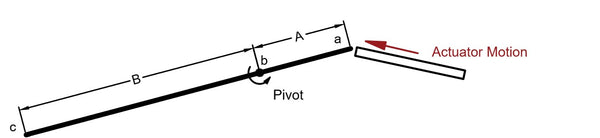
Figure 2: Bras supérieur pivotant autour d’un pivot au point b
Mike savait qu’il avait besoin que la porte du poulailler s’ouvre d’environ 18 pouces. Afin d’obtenir un rapport ‘R’ égal à trois pour que le point ‘c’ parcoure 18 pouces avec une course de 6 pouces, il a placé le point de pivot aux ¾ vers le point ‘a’ (figure 3). Mike a fait cela en positionnant le bras de sorte qu’il y ait 3,5 pouces d’un côté du point de pivot et 10,5 pouces (3,5 pouces x 3) de l’autre côté.
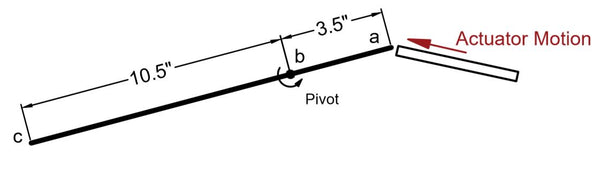
Figure 3: Bras supérieur pivotant autour d’un pivot au point b avec cotes
Après cela, Mike a ajouté un autre bras pour transformer le mouvement de rotation en mouvement linéaire. Il explique : « Ma solution a été d’ajouter un autre bras dont le but est de compenser l’arc, car une extrémité se déplace en arc tandis que l’autre s’ajuste à un mouvement linéaire. » La figure 4 est un schéma réalisé pour son projet d’ouvre-porte automatique de poulailler DIY, présenté à différentes positions le long de sa course. À noter que la vitesse de la porte du poulailler et la force appliquée par l’actionneur changent tout au long du déplacement. Il s’agissait ensuite d’ajuster le positionnement pour obtenir le déplacement de porte souhaité.
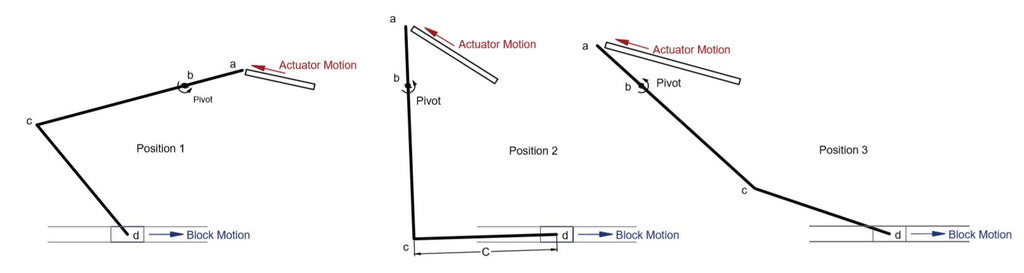
Figure 4: Porte de poulailler à trois positions différentes
La table élévatrice à ciseaux
La table élévatrice à ciseaux est une autre application qui utilise ce principe pour obtenir davantage de mouvement linéaire grâce à l’effet de levier mécanique. Pour illustrer comment tirer parti d’un vérin linéaire, un modèle 3D a été créé avec un actionneur pour une table à ciseaux afin de simuler le grand déplacement d’une plate-forme avec un déplacement relativement plus court de l’actionneur.
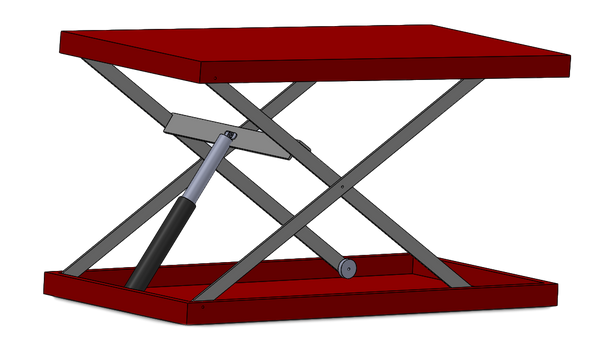
Figure 5: Modèle 3D d’une table élévatrice à ciseaux à un étage
Comme on le voit à la figure 5, un actionneur pour table à ciseaux avec une course relativement courte (8 pouces dans ce cas) a été utilisé pour soulever jusqu’à une hauteur de 36 pouces. Les tables à ciseaux fonctionnent selon le même principe, où un corps pivote autour d’un point de pivot et crée un avantage mécanique. Cependant, au lieu d’ajouter un autre bras dont le but est simplement de traduire le mouvement de rotation d’une extrémité, le mouvement des extrémités des bras est contraint à une direction horizontale. Il en résulte que la direction de la force est uniquement vers le haut.
Fait intéressant, pour une table à ciseaux, si l’actionneur est monté sur la moitié supérieure, la table s’élève lorsque l’actionneur s’étend. En revanche, si l’actionneur est monté sur la moitié inférieure, la table s’élève lorsque l’actionneur se rétracte. Notez aussi que plus l’actionneur est monté près de l’articulation centrale des bras, plus la table s’élèvera, mais plus l’actionneur nécessitera de force.
Si vous cherchez comment tirer parti d’un vérin linéaire afin de déplacer un objet sur une plus grande distance, un actionneur télescopique ou un mécanisme à ciseaux DIY fera l’affaire. Pour un actionneur destiné à une table à ciseaux ou à un mécanisme de porte, Progressive Automations propose en stock une variété de modèles avec des courses et des forces variées pour répondre à tous vos besoins de bricolage.