
Zdarza się, że chcesz przemieścić obiekt na większą odległość, niż wynosi długość skoku siłownika. Możesz to osiągnąć, używając teleskopowego siłownika, albo wykorzystać na swoją korzyść zasady mechanicznego przełożenia. Typowe przykłady to podnośnik nożycowy lub to, co zrobił nasz przyjaciel Mike Senna, twórca robota Wall-E, w swoim DIY automatycznym otwieraczu drzwi kurnika.
Mechaniczne przełożenie
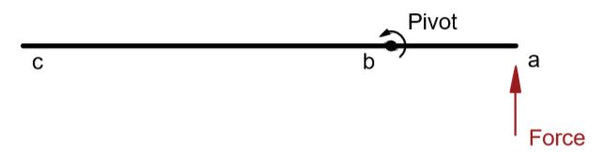
Fizyka stojąca za tymi zastosowaniami polega na wykorzystaniu stosunku odległości od punktu obrotu po każdej stronie. Jak widać na rysunku 1, siłownik jest zamontowany w punkcie ‘a’, a stały przegub znajduje się w punkcie ‘b’. Przyjmując stosunek ‘B’ do ‘A’, otrzymujesz wartość ‘R’. Oznacza to, że punkt ‘c’ obróci się ‘R’ razy bardziej niż wynosi skok siłownika. Zwiększy to jednak wymaganą przez siłownik siłę oraz prędkość obrotową punktu ‘c’ ‘R’ razy. To właśnie zasada, dzięki której można wykorzystać siłownik liniowy, biorąc pod uwagę jego długość skoku i miejsce, w którym go zamontujesz.
Automatyczny otwieracz drzwi kurnika DIY
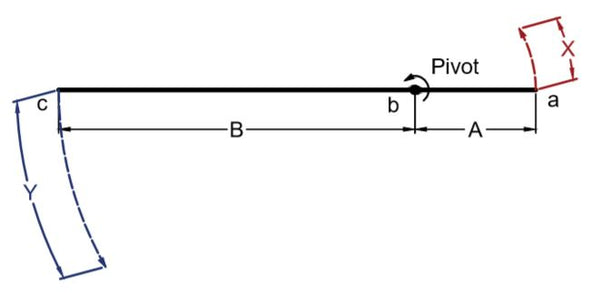
Aplikacja Mike’a Senny wykorzystuje tę samą zasadę, opisaną powyżej, i stanowi świetny przykład dodania kolejnego elementu, aby zamienić obrót punktu ‘c’ na ruch liniowy. Na rysunku 2 widać, że górny element obraca się wokół punktu obrotu, a siłownik pcha w punkcie ‘a’.
Rysunek 2: Górny element obracający się wokół przegubu w punkcie b
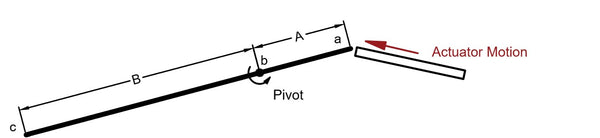
Mike wiedział, że drzwi kurnika muszą otwierać się na około 18 cali. Aby uzyskać stosunek ‘R’ równy trzem i zapewnić, że punkt ‘c’ przemieści się o 18 cali przy skoku 6 cali, umieścił punkt obrotu w ¾ drogi w stronę punktu ‘a’ (rysunek 3). Mike zrobił to, ustawiając ramię tak, aby po jednej stronie punktu obrotu było 3,5 cala, a po drugiej 10,5 cala (3,5 cala x 3).
Rysunek 3: Górny element obracający się wokół przegubu w punkcie b z wymiarami
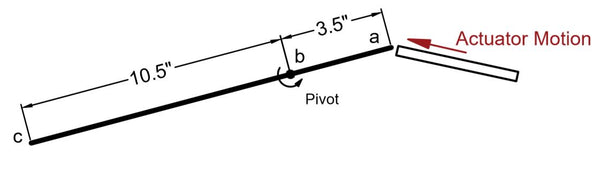
Po tym Mike dodał kolejny element, aby przekształcić ruch obrotowy w ruch liniowy. Wyjaśnia: “Moim rozwiązaniem było dodanie kolejnego ramienia, którego celem jest kompensacja łuku, ponieważ jeden koniec porusza się po łuku, a drugi dopasowuje się do ruchu liniowego.” Rysunek 4 to schemat wykonany do jego projektu DIY Chicken Coop Automatic Door Opener, pokazany w kilku różnych pozycjach na przestrzeni całego ruchu. Zauważ, że prędkość drzwi kurnika i siła przykładana przez siłownik będą się zmieniać w trakcie ruchu. Teraz wystarczyło skorygować ustawienia, aby uzyskać pożądany przebieg otwierania drzwi.
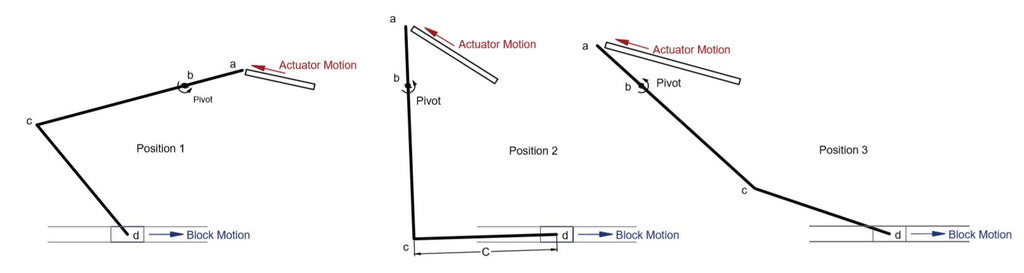
Rysunek 4: Drzwi kurnika w trzech różnych pozycjach
Podnośnik nożycowy
Podnośnik nożycowy to kolejne zastosowanie tej zasady, które pozwala uzyskać większy ruch liniowy dzięki mechanicznemu przełożeniu. Aby podać przykład, jak wykorzystać siłownik liniowy, przygotowano model 3D z siłownikiem dla podnośnika nożycowego, aby zasymulować większy ruch platformy przy relatywnie krótszym ruchu siłownika.
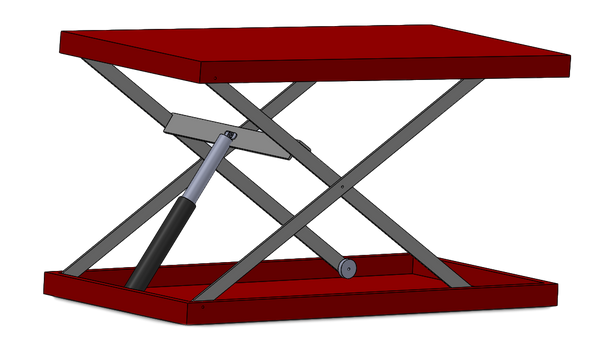
Rysunek 5: Model 3D jednotaktowego podnośnika nożycowego
Jak widać na rysunku 5, w podnośniku nożycowym użyto siłownika o stosunkowo krótkim skoku (w tym przypadku 8 cali), aby unieść platformę na wysokość 36 cali. Podnośniki nożycowe działają według tej samej zasady: element obraca się wokół punktu obrotu i powstaje przełożenie mechaniczne. Zamiast jednak dodawać kolejny element, którego zadaniem jest jedynie przełożyć ruch obrotowy jednego końca, ruch końców elementów jest ograniczony do kierunku poziomego. W efekcie kierunek działania siły jest wyłącznie ku górze.
Co ciekawe, jeśli siłownik jest zamontowany w górnej połowie, podnośnik będzie się podnosił podczas wysuwu siłownika. Natomiast gdy siłownik jest zamontowany w dolnej połowie, podnośnik będzie się podnosił podczas wsuwu siłownika. Zauważ też, że im bliżej środkowego przegubu elementów zamontujesz siłownik, tym większy będzie ruch podnośnika, ale siłownik będzie wymagał większej siły.
Jeśli szukasz sposobu, jak wykorzystać siłownik liniowy, aby przemieścić obiekt na większą odległość, teleskopowy siłownik lub mechanizm podnośnika nożycowego DIY w zupełności wystarczy. Do podnośnika nożycowego lub mechanizmu drzwi Progressive Automations ma w ofercie różne modele o zróżnicowanych skokach i siłach, które zaspokoją wszystkie Twoje potrzeby DIY.