Zautomatyzowane łaziki to zaawansowana, a zarazem ekscytująca technologia do poznawania naszych sąsiednich planet. Budowa łazika marsjańskiego to wyzwanie dla każdego zespołu, zwłaszcza w obliczu globalnych niepewności, takich jak pandemia. Od problemów z łańcuchem dostaw i opóźnionych wysyłek po ograniczoną komunikację i utrudnione spotkania zespołu na żywo, zespół DJS Antariksh udowodnił, że potrafi stworzyć bardzo udanego łazika marsjańskiego, stawiając czoła każdemu wyzwaniu! Jeśli interesuje Cię European Mars Rover Challenge lub pasjonują Cię autonomiczne łaziki, ten artykuł jest dla Ciebie! Opiszemy drogę zespołu DJS Antariksh do urzeczywistnienia ich łazika, z wykorzystaniem elektrycznych liniowych siłowników na European Mars Rover Challenge!
Poznaj zespół DJS Antariksh

Team DJS Antariksh tworzą studenci studiów licencjackich z różnych dziedzin inżynierii; to oficjalny zespół łazika marsjańskiego Dwarkadas J. Sanghvi College of Engineering w Mumbaju (Indie). Aby pokazać swoją pasję do branży kosmicznej i robotyki, wspólnie budują łazika, startując jednocześnie w różnych Mars Rover Challenge.
W debiutanckim roku zespół zajął 3. miejsce na świecie i zdobył nagrodę za najlepsze planowanie badań w 2020 r. W European Rover Challenge (ERC) 2021 Remote DJS Antariksh zdobył 1. miejsce na świecie oraz wyróżnienia Best Science i Best Navigation. Ich oficjalny projekt łazika – „Abhigyaan” – zajął 3. miejsce w International Rover Design Challenge (IRDC) 2022 i został zwycięzcą 1. miejsca w European Rover Challenge 2022 (formuła REMOTE).
Zespół DJS Antariksh zamierza utrzymać rozpęd w przygotowaniach do International Rover Challenge 2023. Mimo że pochodzą z jednego z miast najmocniej dotkniętych pandemią, wciąż przełamują bariery i dążą do doskonałości.
Planowanie i projektowanie łazika

Niedługo po sformowaniu zespołu DJS Antariksh w 2020 r. cały stan objęto lockdownem z powodu pandemii. W tym czasie opiekunowie z wydziałów zachęcali zespół, by dał z siebie wszystko, a przynajmniej zdobył jak najwięcej doświadczenia i wiedzy. Choć zespół nie miał wcześniejszej wiedzy ani praktyki przy łaziku marsjańskim, wykonywali tyle pracy online, ile się dało – prowadzili badania, projektowali, burze mózgów i analizy ryzyka dla swojego łazika. Poniżej przedstawiono pięć podzespołów zespołu i ich role:
- Dział programowania: opracowuje algorytmy dla całościowych operacji łazika oraz skutecznego wykrywania obiektów.
- Dział marketingu: odpowiada za pełne zarządzanie zespołem i finanse oraz działania promocyjne.
- Dział mechaniczny: odpowiada za projekt, wytwarzanie i testy konstrukcji łazika.
- Dział elektroniki: zajmuje się rozwojem i integracją systemów elektronicznych łazika.
- Dział naukowy: formułuje hipotezy, które można przetestować na miejscu lądowania, badając historię geologiczną Marsa.
Zespół startował także w tylu wirtualnych zawodach Mars Rover Challenge, w ilu zdołał, gdy projekt był jeszcze w toku. Obejrzyj pełne wideo zespołu DJS Antariksh poniżej:
Ze względu na konieczność spotkań online podczas pandemii idealne interakcje zespołowe i atmosfera spotkań offline były niemożliwe. Wiele organizacji ucierpiało z powodu pandemii, co przełożyło się na braki i opóźnienia w dostępności komponentów. Zespół jednak wykonywał maksimum pracy zdalnie, jednocześnie zbierając środki na projekt, i po 1,5 roku udało się pozyskać pierwsze komponenty.
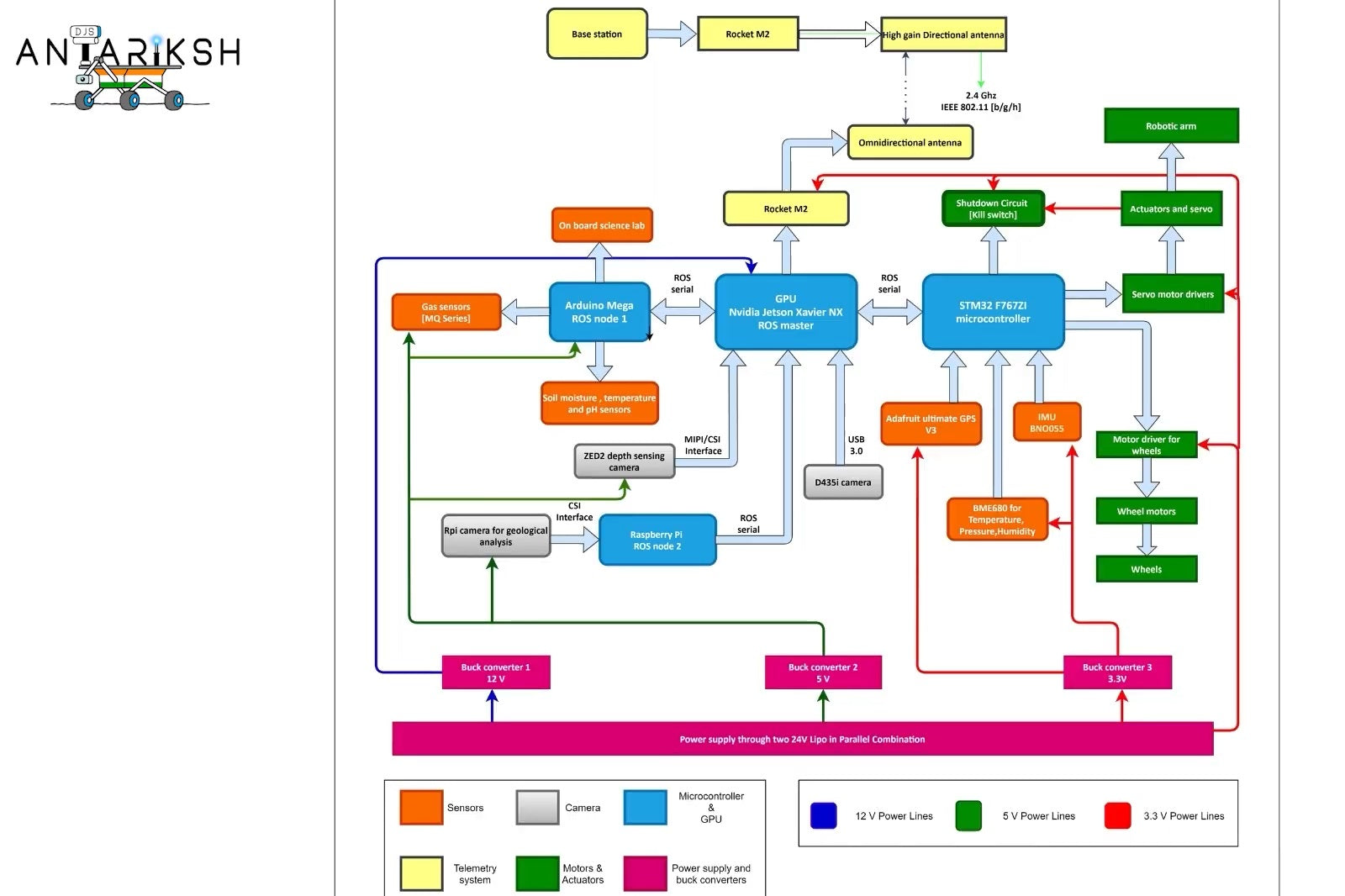
Dzięki oprogramowaniu takim jak HiRISE i JMARS zespół zebrał dane o cechach geologicznych Marsa, by opracować misję naukową. Wszystko – od podstawowych po złożone podsystemy ramienia robotycznego – zaprojektowano, a później zbudowano od zera. Do symulacji obwodów użyto pakietu Proteus, a wytrzymałe, przemysłowej klasy PCB zaprojektowano w Altium Designer.

Produkcja łazika marsjańskiego

Po złagodzeniu ograniczeń pandemicznych zespół mógł wreszcie spotykać się offline, aby osobiście projektować, planować i wytwarzać swojego łazika. Podczas pandemii i na wczesnych etapach planowania pewne elementy łazika zaprojektowano z myślą o technologiach, które później okazały się niedostępne do zakupu. Z powodu ograniczonej dostępności i długiego czasu realizacji niektórych komponentów zespół musiał strategicznie zaplanować elementy, które zamówi w połowie 2021 r.

Podczas finalizacji nowych komponentów do łazika konieczne było upewnienie się, że są one dostępne na rynku, by zespół mógł je kupić i nad nimi pracować. W efekcie proces wytwarzania łazika przesunięto na koniec 2021 i początek 2022 roku, kiedy zespół miał już przygotowane plany dotyczące zasobów, z jakich może skorzystać. W niektórych przypadkach trzeba było przeprojektować wybrane podsystemy i wprowadzać improwizacje na bieżąco, aby spełnić wymagania kompatybilności elementów, które udało się pozyskać. Zespół początkowo ruszył z powolną produkcją – była to ich pierwsza własna wytwórczość przy bardzo ograniczonych technologiach i finansowaniu.

Zespół upewniał się, że projekt zmierza we właściwym kierunku, konsultując się z opiekunami, starszymi kolegami i ekspertami z branży, aby potwierdzić, że wszystko, co kupują i obrabiają, będzie odpowiednie do zakładanych celów. Po wielu rozmowach z ekspertami udało się ograniczyć opóźnienia, które mogłyby przenieść się na kolejny rok. Wsparcie partnerów i sponsorów odegrało kluczową rolę w projekcie i jego finansowaniu. Do budowy łazika wykorzystano elementy złączne ze stali nierdzewnej od Sunrise Multi Tech Fasteners Pvt. Ltd. oraz narzędzia warsztatowe od Samsan Tools. Zespół otrzymał także własną, drukowaną płytkę obwodu drukowanego od PCB Power Market India.

Obejrzyj wideo poniżej, aby dowiedzieć się więcej o zdalnej pracy nad projektami robotycznymi:
Zastosowanie siłowników liniowych w Mars Rover Challenge

Nasze PA-14P-8-150 i PA-14P-4-150 elektryczne siłowniki liniowe służą do napędu robotycznego ramienia łazika, zapewniając mu sześć stopni swobody (6DOF). Dzięki integracji naszych siłowników liniowych PA-14P ze sprzężeniem zwrotnym informacje o położeniu można odczytywać z sygnałów sprzężenia zwrotnego pochodzących z wbudowanych w siłownik potencjometrów. Informacja o położeniu pozwala systemowi określić, czy siłowniki osiągnęły wymagane pozycje, co minimalizuje błędy i zapewnia wysoką dokładność. Co więcej, te siłowniki napędzane silnikiem elektrycznym są kompaktowe i lekkie, co pomaga utrzymać niską masę całego łazika marsjańskiego.

„Urządzenie manipulacyjne łazika to 6DOF ramię robotyczne z dwupalczastym chwytakiem. Ramię składa się z dwóch liniowych i czterech obrotowych siłowników rozmieszczonych tak, aby zapewnić lepsze rozłożenie obciążenia i wydajność. Dwupalczasty chwytak jest napędzany silnikiem, który zasila i kontroluje zespół kinematyczny chwytaka oraz ruch szczęk.” – Rutwik Bhangale
Aby zobaczyć więcej filmów DJS Antariksh, odwiedź ich kanał YouTube i sprawdź najnowszy materiał poniżej:
PODSUMOWANIE
Dzięki współpracy zespołowej, wytrwałości i niezachwianemu zaangażowaniu zespół DJS Antariksh pokonał każde napotkane wyzwanie, tworząc bardzo udanego łazika marsjańskiego. Aby śledzić aktualności dotyczące zespołu DJS Antariksh i ich przyszłych wyzwań związanych z łazikami, obserwuj ich na Instagramie, Facebooku, Twitterze i LinkedInie!
Dziękujemy zespołowi DJS Antariksh za podzielenie się projektem i inspirowanie innych! Życzymy powodzenia w International Rover Challenge 2023!
Jeśli masz niestandardowe projekty, aplikacje lub pytania techniczne dotyczące naszych elektrycznych siłowników liniowych, skontaktuj się z nami w dowolnym momencie. Jesteśmy ekspertami w tym, co robimy, i chętnie pomożemy w Twoich przyszłych projektach!
sales@progressiveautomations.com | 1-800-676-6123