Symulatory ruchu to kluczowe narzędzia do analiz inżynierskich, szkoleń, edukacji i rozrywki, ponieważ odtwarzają realistyczne wrażenie ruchu. Siłowniki liniowe są popularnym rozwiązaniem do napędzania mechaniki dzięki licznym zaletom, jakie oferują; symulatory ruchu mogą je jednak integrować na wiele sposobów i do różnych celów. W tym artykule omówimy kilka przykładów symulatorów ruchu, aby lepiej zrozumieć, jak symulatory ruchu i siłowniki liniowe współpracują ze sobą.
Przykłady zastosowań
Istnieje wiele sposobów wdrożenia elektrycznych siłowników liniowych w symulatorach ruchu. Oto kilka przykładów, gdzie siłowniki napędzają ruch liniowy:
- Symulatory lotu
- Symulatory pojazdów wojskowych
- Kolejki w parkach rozrywki
- Symulatory jazdy/wyścigowe
- Symulatory statków kosmicznych
- Platformy Stewarta
- Różne gry arcade
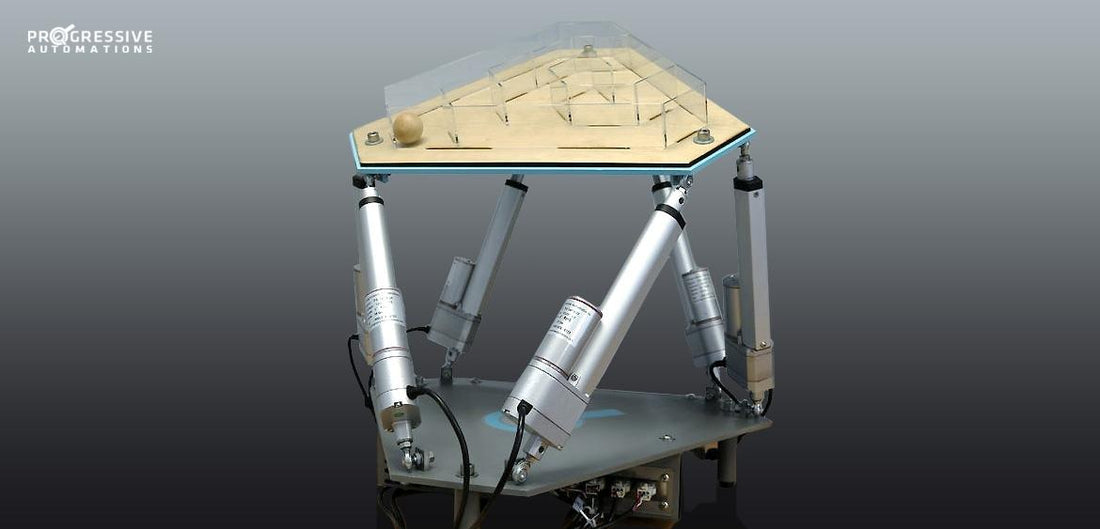
Sześciosiowa platforma z siłownikami liniowymi (platforma Stewarta)

Z dumą sponsorowana przez Progressive Automations, platforma Stewarta z Wydziału Fizyki Inżynieryjnej UBC zapewnia ciekawy i interaktywny sposób poznawania sterowania ruchem liniowym oraz fizyki stojącej za robotyką.
Dzięki integracji naszych siłowników liniowych PA-14P ze sprzężeniem zwrotnym można odczytywać informację o położeniu z sygnałów sprzężenia zwrotnego pochodzących z wbudowanych w siłownik potencjometrów. Posiadanie informacji o położeniu pozwala systemowi sprawdzić, czy siłowniki dokładnie osiągnęły wymagane pozycje, minimalizując błędy i zwiększając powtarzalność. Chociaż czujniki efektu Halla czy akcelerometry mogą zapewniać większą dokładność, integruje się je trudniej, podczas gdy sprzężenie z potencjometru oferuje wystarczającą precyzję przy prostszej integracji. Co więcej, modele PA-14P-6-35 zapewniają także prędkość (2.00"/s bez obciążenia) i kompaktowy rozmiar odpowiedni do tej aplikacji wymagającej skoku 6”.

LC-062 – mikrokontroler Arduino Due – komunikuje się z sześcioma siłownikami oraz dwiema nakładkami MultiMoto dla Arduino i z komputerem nadrzędnym (PC) przez USB (port szeregowy). Ponieważ nasze płytki MultiMoto mogą jednocześnie obsłużyć maksymalnie cztery niezależnie sterowane kanały, sześć siłowników wymaganych w projekcie podzielono po trzy na każdą płytkę. Ruchy siłowników były sterowane za pomocą regulacji PID, wykorzystując odczyty z potencjometrów PA-14P jako sygnały wejściowe.

Wraz z niestandardowym graficznym interfejsem użytkownika (GUI) kontroler Leap Motion, wykorzystujący trzy emitery IR i dwie kamery, pozwala w pełni sterować ruchem platformy machnięciem dłoni. Aby uzyskać szczegółowy opis platformy Stewarta, dołączamy raport projektu oraz link do GitHuba.
https://content.instructables.com/ORIG/FQC/KXUA/JIYU1JDE/FQCKXUAJIYU1JDE.pdf
https://github.com/progressiveautomations/Stewart-Platform
Technologia platform Stewarta jest wykorzystywana w wielu współczesnych symulatorach ruchu dzięki 6 stopniom swobody (trzem dla położenia i trzem dla orientacji), czyli maksymalnej liczbie stopni swobody, jaką może mieć pojedyncze ciało sztywne. Większy przykład tego rozwiązania to Cruden HexaPod Motion Simulator, który dzięki sześciu stopniom swobody zapewnia maksymalnie dokładne i powtarzalne symulacje.

Symulator lotu z wykorzystaniem siłowników liniowych

Wraz z rozwojem technologii symulatory ruchu stają się coraz bardziej dostępne dla majsterkowiczów na całym świecie. Znakomity przykład to projekt Symulatora Lotu naszego klienta Anthony’ego Escalante. Dzięki modułowej konstrukcji z elementów wykonanych na zamówienie, elektronice i oprogramowaniu Anthony zbudował w pełni działający domowy symulator ruchu lotniczego.
Zaprojektowany z wykorzystaniem wielu PA-03 i PA-04 – standardowych siłowników liniowych – projekt Anthony’ego oferuje 6 stopni swobody, podobnie jak wspomniana platforma Stewarta. Każdy z naszych standardowych siłowników liniowych zapewniał odpowiednią prędkość i siłę, aby płynnie realizować przechyły, obroty i skręty, wiernie symulując lot na platformie ruchu Anthony’ego.

Wspierany przez cztery zasilacze system sterowania zapewnia odpowiedni pobór prądu, aby zasilać sterowniki silników i mikrokontrolery, które są schludnie umieszczone w centrum sterowania symulatora.
„Działa bardzo płynnie i jest łatwy w utrzymaniu” – mówi Anthony. „Zadbałem o modułową budowę pod kątem serwisu. Części były łatwo dostępne w sklepach z artykułami metalowymi, a elementy metalowe kupione i docięte w Metal Mart. Siłowniki i zawieszenie łatwo wymienić. Zero problemów z przestojami. Moja babcia mogłaby to zrobić sama”.

Siłowniki liniowe z prowadnicą, takie jak PA-18 i PA-08, to świetne alternatywy dla symulatorów ruchu w pomieszczeniach, gdy potrzebne jest rozwiązanie o kompaktowej długości całkowitej zarówno w pozycji wsuniętej, jak i wysuniętej. Dzieje się tak, ponieważ siłowniki liniowe z prowadnicą mają zakres ruchu zamknięty w z góry określonej ścieżce prowadnicy, zamiast wysuwanego na zewnątrz tłoczyska.
Dwupłatowy symulator dla dzieci

Symulatory ruchu wykorzystywane są także w rozrywce, czego przykładem jest Dwupłatowy Symulator dla Dzieci stworzony przez EAA 485. Projekt był unowocześnieniem oryginalnego 3‑osiowego symulatora znanego z siostrzanego oddziału w Wetumpka, AL. John McKiernan, prezes EAA 485, z radością podzielił się z nami swoim projektem!
Symulator dwupłatowca potrzebował skoku 4” w osiach przechyłu i pochylenia, a ponieważ oś odchylenia była na obrotnicy, zmiana punktu mocowania mogła zwiększać lub zmniejszać ruch w osi odchylenia. Dzięki wcześniejszym doświadczeniom z naszymi produktami McKiernan określił, że odpowiednim modelem jest PA-03 24 V DC, 200 lb ze skokiem 4”.
„Dopasowanie zajęło mniej niż dzień i oś odchylenia zaczęła działać. Następnie kupiłem 3 identyczne siłowniki, aby mieć zapasowy. Aby uzyskać przechył i pochylenie, trzeba było wytoczyć 4 aluminiowe bloki, by zamontować łożysko przegubowe Heim. Przeguby Heim były potrzebne, by przejąć nieco ruchu osiowego przy napędach przechyłu i pochylenia. Wykonano je ręcznie i działały dobrze. Później powstał nowy panel bezpieczników z normalnymi bezpiecznikami wsuwanymi – po jednym na każdy siłownik, licznik Hobbs i kokpit. Kokpit ma prawdziwe wskaźniki lotnicze i sprytny dźwięk silnika gwiazdowego sterowany przepustnicą. Używa testerów serw RC podłączonych do modułu i małego głośnika centralnego za tablicą przyrządów. Jest nawet realistyczny dźwięk karabinu maszynowego po naciśnięciu przycisku” – wyjaśnia McKiernan.
McKiernan dodaje: „Oryginalne przełączniki używały rolki sprężynowej, która w położeniu neutralnym drążka lub pedałów znajdowała się w bloku fenolowym, a poruszenie drążkiem lub pedałami kierunku przesuwało ją na aluminiową płytkę przełącznika. Nie podobało mi się, że drążek zapewniał ścieżkę elektryczną, choć bloki fenolowe izolowały obszar pod siedzeniem. Zostały zamocowane do aluminiowej płyty odwróconej do góry nogami i dopasowane nad istniejącą, dolną, oryginalną strukturą przełączników.”
Kulka spoczywa w środkowym położeniu przełącznika przy neutralnym ustawieniu, a ruch drążka lub pedału przesuwa rolkę i wciska przełącznik. Układ przechyłu, z początku okrągły, wymagał więcej strojenia, ponieważ sam blok należało przeciąć, aby dopasować przełącznik do podstawy. Mimo kilku wyzwań, podczas pierwszego pokazu na KJKA AOPA symulator dwupłatowca „przeleciał” z 36 dziećmi, a McKiernan był bardzo zadowolony z efektu.
Projekty tego typu, które używają przełączników jako elementów sterujących, są prostsze w integracji dla początkujących – bez konieczności programowania. Nasze mikrosiłowniki mają kompaktowe wymiary, idealne do tworzenia prototypów lub miniaturowych replik podobnych symulatorów ruchu. Dowód koncepcji (proof of concept) do prezentacji pomaga wychwycić potencjalne przeszkody przed budową pełnowymiarowego symulatora.
PODSUMOWANIE
Symulatory ruchu występują w różnych kształtach i rozmiarach, dzięki czemu nadają się do odtwarzania wielu scenariuszy specyficznych dla danej aplikacji. Urządzenia takie jak mikrokontrolery, przełączniki i sterowniki silników są powszechnie integrowane z siłownikami liniowymi, aby symulatory mogły możliwie najdokładniej odtwarzać ruch.
Mamy nadzieję, że ten materiał był dla Ciebie równie ciekawy i pomocny – zwłaszcza jeśli interesuje Cię, jak symulatory ruchu współpracują z siłownikami liniowymi! Jeśli masz pytania lub chcesz porozmawiać o naszych produktach, skontaktuj się z nami. Jesteśmy ekspertami w tym, co robimy, i chętnie pomożemy w każdy możliwy sposób.
sales@progressiveautomations.com | 1-800-676-6123