
Wydajność, trwałość i precyzja w kompaktowej obudowie to często pożądane cechy elektrycznych siłowników liniowych do zastosowań w różnych branżach i aplikacjach o ograniczonej przestrzeni. Wybierając odpowiednie mikro- i minisiłowniki, można osiągnąć korzyści w aplikacjach o ograniczonej przestrzeni, takie jak precyzja sterowania, łatwość obsługi i optymalizacja wydajności.
Na tej stronie znajdziesz podstawowe informacje na temat mikrosiłowników i minisiłowników, ich zalet, naszej oferty modeli, najważniejszych specyfikacji oraz wskazówki, jak wybrać najlepszy siłownik do konkretnych potrzeb.
Czym są mikro i mini siłowniki liniowe?
Siłowniki Są podstawowymi elementami różnych systemów mechanicznych, odgrywającymi kluczową rolę w przekształcaniu energii w ruch. Zasadniczo siłownik pobiera energię ze źródła, zazwyczaj elektryczne, hydrauliczne lub pneumatycznei przekształca go w ruch fizyczny. Osiąga się to poprzez różne komponenty i mechanizmów w zależności od rodzaju siłownika.
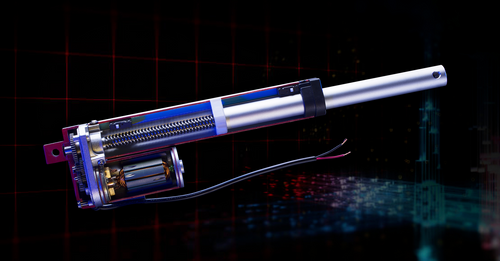
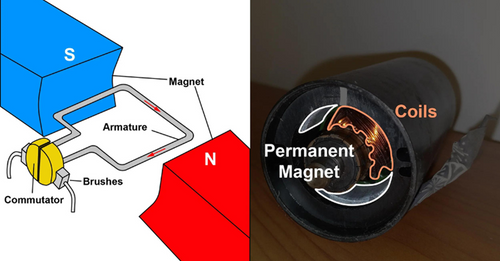
W elektryczne siłowniki liniowePrąd elektryczny jest wykorzystywany do wytwarzania ruchu obrotowego w silnik elektryczny który jest mechanicznie połączony ze skrzynią biegów i wykorzystuje śruba pociągowa do cyklicznego obracania wału siłownika przymocowanego do KULMINACJA nakrętka wiertnicza do ruchu liniowego. Śruba kulowa Istnieją również warianty oferujące różne korzyści i wady, dostosowane do różnych zastosowań.
Podczas gdy tradycyjne siłowniki mogą osiągać duże rozmiary, mikro- i mini siłowniki liniowe są zaprojektowane do wykonywania tej samej pracy w znacznie mniejszej skali. Te kompaktowe urządzenia mieszczą się w ciasnych przestrzeniach i idealnie nadają się do zastosowań, w których precyzja i subtelność są kluczowe. W przypadku wyboru długiego skoku, szerokość i wysokość to główne obszary, które podkreślają kompaktowe wymiary mikro- i mini siłowników.
Przyjmując krótką długość skoku wynoszącą 2 cale, szerokość i wysokość mikrosiłowników są na tyle kompaktowe, że urządzenie mieści się na dłoni. Miniaturowe siłowniki mieć większy rozmiar niż mikrosiłownikijednak siłowniki miniaturowe nadal mają kompaktową konstrukcję, zajmując około połowę lub jedną trzecią objętości wymiarowej siłowniki standardowe.

Zalety mikro i mini siłowników liniowych elektrycznych

Mikro- i mini siłowniki liniowe oferują szereg zalet, które czynią je niezbędnym elementem współczesnego społeczeństwa. Ich kompaktowe rozmiary pozwalają na integrację w ciasnych przestrzeniach, zapewniając precyzyjną kontrolę i ruch tam, gdzie większe siłowniki nie mieszczą się.
Miniaturyzacja zwiększa wszechstronność i zdolność adaptacji systemów, z którymi są zintegrowane, a także pozwala na energooszczędną pracę mniejszych silników.
- Kompaktowy rozmiar: Znacznie mniejsza szerokość i głębokość pozwalają na zastosowanie formatu, który spełni wymagania aplikacji ze ścisłymi ograniczeniami przestrzennymi lub gdy trzeba zmaksymalizować dostępną przestrzeń magazynową w schowkach.
- Precyzja: Zaprojektowano z opcjami dla sprzężenie zwrotne pozycyjne Aby sprostać wymaganiom dokładności, zapewniają precyzyjną kontrolę ruchu i mają mniejszą tolerancję wykonania niż większe siłowniki liniowe.
- Wydajność: Pomimo rozmiarów są energooszczędne, pobierają mało prądu, mają wbudowane wyłączniki krańcowe i niski pobór mocy w stanie spoczynku, co czyni je idealnymi do systemów przenośnych i urządzeń zasilanych bateryjnie.
- Wszechstronność: Opcje różnych wartości siły, prędkości, długości skoku, typów sprzężenia zwrotnego, operacji napięciowych i innych konfigurowalnych specyfikacji sprawiają, że mikro- i minisiłowniki są wszechstronne i nadają się do stosowania w różnych zastosowaniach, od urządzeń medycznych po elektronikę użytkową.
Wybór odpowiedniego mikrosiłownika i minisiłownika do Twojego projektu
Wybierając właściwy mikro- lub minisiłownik do swojego projektu, należy wziąć pod uwagę kilka kluczowych kwestii:
- Wymagania dotyczące obciążenia: Odnosi się do tego, ile siły będzie potrzebne w danym zastosowaniu. Będzie to miało wpływ na wybór modelu siłownika.
- PrędkośćW zależności od zastosowania, możesz potrzebować szybkiego lub wolnego siłownika kompaktowego. Wybierz odpowiedni do swoich potrzeb.
- Długość skoku: Wskazuje, jak daleko musi przesunąć się siłownik. Upewnij się, że długość skoku jest dostosowana do wymagań dotyczących odległości ruchu w projekcie.
- Wymagania dotyczące energii elektrycznej: Wymagania dotyczące napięcia i poboru prądu dla każdego modelu siłownika mogą się różnić. Należy wziąć pod uwagę napięcie i opcje zasilania dostępne dla Twojego siłownika kompaktowego.
- Odporność na środowisko: Weź pod uwagę swoje zastosowanie i środowisko, aby określić, czy Twój kompaktowy siłownik musi wytrzymać określony poziom zapylenia, wnikania cieczy i/lub korozji.
- Informacja zwrotna pozycyjna:Określ, czy Twoja aplikacja będzie wymagała pewnego poziomu precyzji ruchów/możliwości przesuwania, czy też wystarczy podstawowa ręczna kontrola ruchu do przodu i do tyłu.
- Zgodność systemu sterowania: Wybierz systemy sterowania które są kompatybilne z wybranym(-i) siłownikiem(-ami) kompaktowym(-i). Jeśli posiadasz już istniejące systemy sterowania, upewnij się, że wybrany(-e) siłownik(-i) jest(-ą) kompatybilny(-e).
Oferujemy również quiz online z pytaniami, które pomogą Ci dokonać wyboru spośród naszej oferty mikro- i minisiłowników, dzięki czemu znajdziesz model najbardziej odpowiadający Twoim potrzebom.
Wymagania dotyczące obciążenia
Na to wpływa kilka czynników znalezienie odpowiedniej siły Ocena obciążenia wymagana do spełnienia wymagań aplikacji. Zmienne mogą obejmować obciążenie, kąt przyłożenia obciążenia oraz wymiary obciążenia. Wymagania dotyczące obciążenia są mierzone siłą potrzebną do pchnięcia i/lub pociągnięcia bezpośrednio na wał siłownika (przykładowe jednostki: funty, kg, niutony).
Prędkość
Prędkości przesuwu zazwyczaj zależą od opcji siły, dla których skonfigurowano siłownik. Niektóre modele są dostępne z wieloma opcjami siły, które można wybrać podczas składania zamówienia online. Te różne opcje siły mają wewnętrzne przełożenia dostosowane do określonego momentu obrotowego, który również wpływa na prędkość przesuwu siłownika. Prędkość siłownika jest mierzona na podstawie odległości przebytej w danym okresie czasu (np. cal/sekunda, mm/sekunda).
Długość skoku
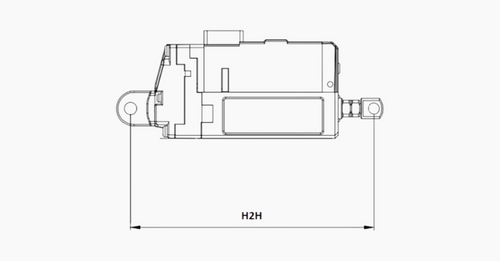
Długość między otworami (H2H) siłownika, mierzona od środka tylnego otworu montażowego do środka przedniego otworu montażowego, zależy od długości skoku. Wynika to z faktu, że dłuższy skok wymaga siłownika z dłuższym korpusem, w którym mieści się zamknięty wał. Długość skoku można obliczyć, odejmując długość H2H siłownika w stanie pełnego zamknięcia od długości H2H siłownika w stanie pełnego otwarcia (przykładowe jednostki: cale lub " w skrócie mm).
Wymagania dotyczące energii elektrycznej
Aplikacja może być wyposażona w istniejące źródło zasilania elektrycznego lub nowo zainstalowany zasilacz o określonych parametrach i wymaganiach dotyczących mocy. Sprawdź parametry napięcia (VDC lub VAC) i prądu (A lub A) źródła(-ów) zasilania i siłownika(-ów), aby upewnić się, że mieszczą się one w odpowiednim zakresie. Ogólna zasada jest taka, że zasilacz musi mieć wyższą wartość prądu znamionowego niż łączne maksymalne zapotrzebowanie prądowe wszystkich podłączonych do niego urządzeń.
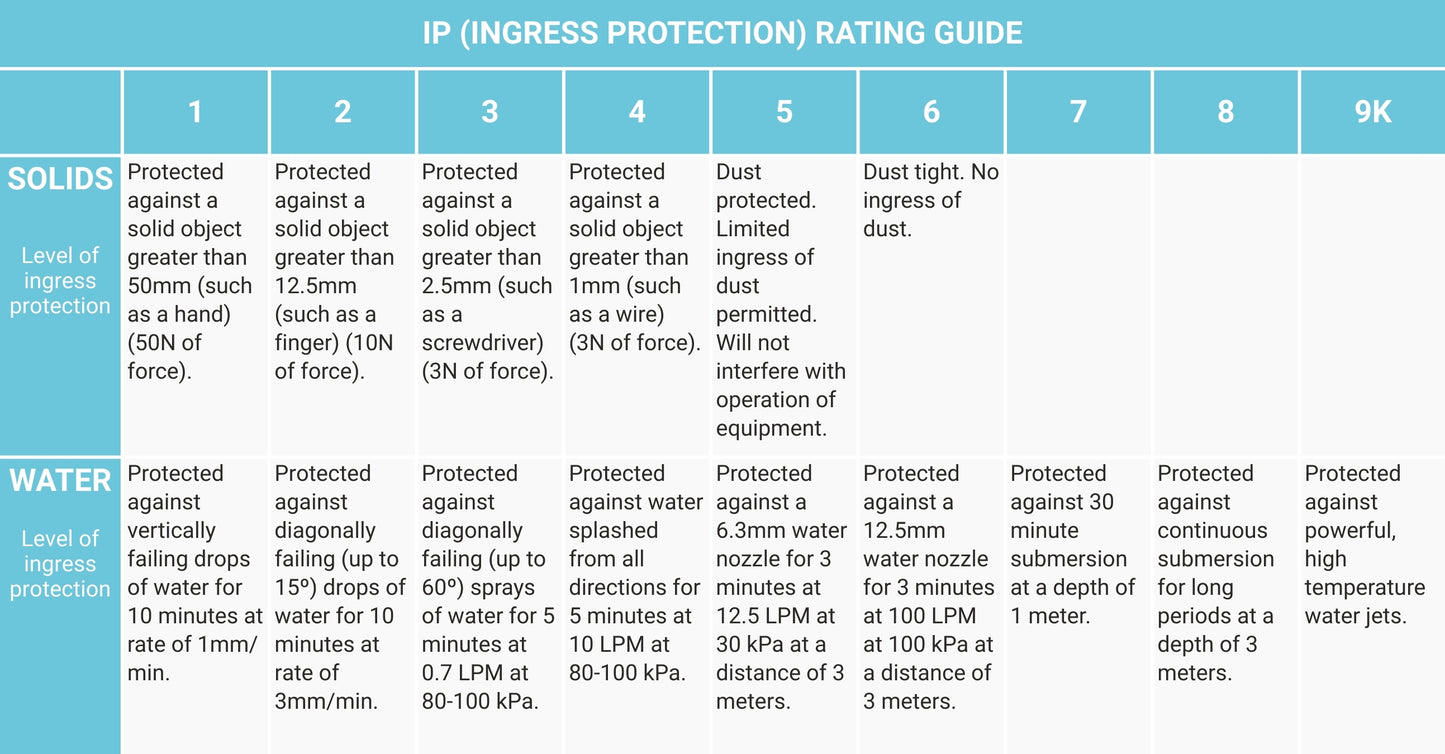
Odporność na środowisko
Stopień ochrony IP System klasyfikacji wykorzystuje dwucyfrowy system do określania stopnia ochrony wszystkich produktów. Pierwsza cyfra oznacza ochronę przed ciałami stałymi, a druga przed cieczami. Kod IP został opracowany w celu ujednolicenia stopni ochrony i ograniczenia błędnej interpretacji/przekłamania stopnia ochrony produktu. Ocena odporności na mgłę solną jest kluczowy dla ochrony przed korozją, która może wystąpić na skutek działania soli na drogach, plażach, słonej wodzie itp.
Informacja zwrotna pozycyjna
Wbudowane urządzenia sprzężenia zwrotnego położenia, takie jak enkodery, czujniki efektu HallaPotencjometry itp. służą do przesyłania sygnałów, które sterownik odczytuje w celu określenia położenia skoku siłownika. Umożliwia to na przykład jednoczesne poruszanie się wielu siłowników z tą samą prędkością. ruch synchroniczny, ustawienia pamięci i/lub wyświetlacz pozycyjny.
Zgodność systemu sterowania

Check if your actuator has the matching communication protocols/positional feedback to the controllers you were considering. For example, the PA-12-T (TTL/PWM) and PA-12-R (RS-485) Micro Precision Servo Actuator provide precise position control with positional accuracy up to 100 um and require advanced communication protocols for such performance.
Another thing to consider is whether the type of motor your actuator has will be compatible with a control system. Continuously operating brushless motors such as those found in our custom ordered PA-14 actuators would require control boxes compatible with their operation such as the LC-241 control box.
To see which of our control boxes and actuators are compatible with each other, check out our control box comparison and compatibility charts.
Funkcje programowalne
Skrzynki sterownicze, takie jak nasza seria FLTCON, umożliwiają programowanie funkcji, funkcji bezpieczeństwa i innych ustawień użytkownika, do których można uzyskać dostęp za pośrednictwem podłączonego urządzenia. zdalne sterowanie. Gdy do skrzynki sterowniczej FLTCON podłączonych jest wiele siłowników typu Halla, skrzynka sterownicza zapewnia synchronizacja silników więc poruszają się razem z tą samą prędkością.
Podstawowe sterowanie ręczne
Zastanów się, czy projekt nie ma ograniczeń budżetowych i wybierz system sterowania, który oferuje najlepszy stosunek jakości do ceny, spełniając jednocześnie Twoje wymagania dotyczące wydajności. Na przykład, proste projekty wewnętrzne, które nie wymagają wysokiej precyzji, będą działać bezproblemowo. podłączenie podstawowego przełącznika kołyskowego bez wysokiej ochrony przed wnikaniem do sterowania mikro lub 2-żyłowym miniaturowy siłownik liniowy w przystępnej cenie.

Dane techniczne siłowników mikro i mini
Po potwierdzeniu wymaganych specyfikacji i funkcji dla danego zastosowania, kolejnym krokiem jest przejrzenie dostępnych modeli, aby określić, który z nich najlepiej odpowiada Państwa potrzebom. Mikrosiłowniki mają pewne cechy wspólne z minisiłownikami, jednak najbardziej zauważalną różnicą między tymi dwiema kategoriami jest zazwyczaj zakres siły nominalnej.
Ocena siły
Siłowniki mikro mogą mieć siłę dynamiczną od 1,34 do 39 funtów (ok. 6,1 kg) i siłę statyczną od 0,67 do 56 funtów (ok. 24 kg). Siłowniki miniaturowe mogą mieć siłę dynamiczną i statyczną od 16 do 450 funtów (ok. 7,1 kg).
| Siła znamionowa (mikro) | PA-MC1 | PA-07 | PA-12-T | PA-12-R |
|---|---|---|---|---|
| Dynamiczny | 8 - 39 lb | 5 lb | 1.34 - 2,69 lb | 3.82 - 22,48 lb |
| Statyczny | 8 - 56 lb | 6,5 lb | 0.67 - 2,69 lb | 1.57 - 22,48 lb |
| Siła znamionowa (mini) | PA-01 | PA-09 | PA-10 | PA-14 |
| Dynamiczny | 16 - 225 lb | 330 lb | 450 lb | 35 - 150 lb |
| Statyczny | 16 - 225 lb | 330 lb | 450 lb | 35 - 150 lb |
Długości skoku
Mikrosiłowniki mają skok od 0,5 do 12 cal, natomiast minisiłowniki od 1 do 40 cal. Poza długością, wymiary fizyczne mikrosiłowników, takie jak szerokość i wysokość, będą również bardziej kompaktowe w porównaniu z minisiłownikami.

Prędkości
Prędkość mikrosiłowników może mieścić się w zakresie od 0,24 do 2,67 cal/s przy pełnym obciążeniu i od 0,30 do 3,15 cal/s bez obciążenia. Prędkość minisiłowników może mieścić się w zakresie od 0,16 do 2,95 cal/s przy pełnym obciążeniu i od 0,28 do 3,54 cal/s bez obciążenia.
| Prędkość (mikro) | PA-MC1 | PA-07 | PA-12-T | PA-12-R |
|---|---|---|---|---|
| Bez obciążenia | 0,31 - 1,85 kalorii/sekundę | 0,59 kalorii/sek | 0,47 - 1,42 kalorii/sekundę | 0,30 - 3,15 kalorii/sekundę |
| Pełne obciążenie | 0,24 - 1,18 kalorii/sekundę | 0,55 kalorii/sek | 0,35 - 0,99 kalorii/sekundę | 0,25 - 2,67 kalorii/sekundę |
| Prędkość (mini) | PA-01 | PA-09 | PA-10 | PA-14 |
| Bez obciążenia | 0,28 - 3,54 kalorii/sekundę | 0,39 kalorii/sek | 0,28 - 0,56 kalorii/sekundę | 0,37 - 2,00 kcal/s |
| Pełne obciążenie | 0,20 - 2,95 kalorii/sekundę | 0,27 kalorii/sekundę | 0,16 - 0,33 kalorii/sekundę | 0,28 - 1,38 kalorii/sekundę |
Positional Feedback
Positional feedback and communication protocol options available for micro actuators include TTL/PWM (PA-12-T) and RS-485 (PA-12-R), while mini actuators have options including hall effect sensors (PA-09 & PA-10) and built-in potentiometer feedback (PA-14).
Each individual stock actuator can only come with one type of positional feedback or communication protocol. The type of positional feedback chosen for an actuator will affect its compatibility with existing control systems. Custom orders for certain models may have options such as limit switch feedback.
Voltage Operation
The main standard voltage option for all our mini and micro actuators is 12 VDC operations for their brushed DC motors. Options for 24 VDC are available for all mini actuators while the micro actuators have 7.4 VDC as an option for the PA-12-T. Selecting a higher voltage option tends to result in a lower current draw for the same model.
Current Draw
Micro actuators have a current draw that ranges between 200 mA to 2.3 A at full load and 30 mA to 200 mA at no load. Mini actuators draw between 2 A to 6 A at full load and 500 mA to 1.5 A at no load.
Aby porównać nasze różne modele mikro- i minisiłowników, stworzyliśmy tabelę porównawczą siłowników referencyjnych.
Jak zamontować mikro i mini siłowniki liniowe elektryczne

The simplest way to ensure you have the correct mounting brackets for your linear actuator will be to source your mounting brackets from the original manufacturer of the actuator and verify they are compatible. For more information, we offer our mounting brackets compatibility chart and product descriptions under each of our actuators.
Other manufacturers may also have similar sources; however, you can also reach out for customer support as needed. For certain cases, users with unique requirements or specialized applications may have to consider custom-making their own brackets according to the measurements, design, and shape they need. Check out our actuator 3D drawings as a source for additional reference.
Equally important to sourcing compatible mounting brackets for your electric micro and mini actuators is selecting the mounting process with a method that is right for your application. Below are two common methods that are used to mount an electric linear actuator.
- Dual pivot mounting
- Stationary mounting
Dual Pivot Mounting

Montaż z podwójnym punktem obrotu to metoda polegająca na zamocowaniu siłownika po obu stronach za pomocą punktu montażowego, który może się swobodnie obracać. Zazwyczaj jest to sworzeń montażowy lub widełki. Montaż z podwójnym punktem obrotu pozwala siłownikowi obracać się w obie strony podczas wysuwania i chowania, umożliwiając aplikacji ruch po ustalonej ścieżce z dwoma swobodnymi punktami obrotu.
Jednym z przykładów zastosowania tej metody jest automatyczne otwieranie i zamykanie drzwi do kurnika. Podczas wysuwania siłownika, dwa punkty stałe umożliwiają otwieranie drzwi. Zamykanie i otwieranie drzwi powoduje zmianę kąta, ale oś obrotu zapewnia wystarczającą przestrzeń do obrotu dwóch punktów mocowania. Stosując tę metodę, należy upewnić się, że siłownik ma wystarczająco dużo miejsca na wysunięcie, bez przeszkód na swojej drodze.
Montaż stacjonarny
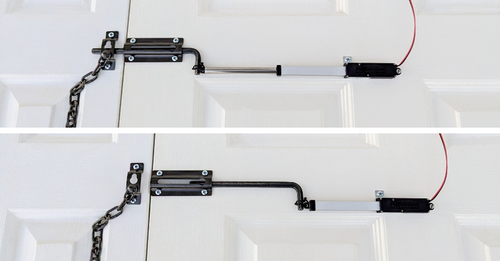
W przypadku montażu stacjonarnego wał może wysuwać się i chować z obudowy po linii prostej, podczas gdy reszta siłownika jest zamontowana w stałej, nieruchomej pozycji. Wspornik montażowy obudowy wału może pomóc w utrzymaniu idealnego wyrównania siłownika na zamontowanej powierzchni.
Ten rodzaj mocowania jest powszechnie stosowany do wykonywania czynności takich jak pchanie i ciągnięcie osprzętu. Na przykład, ten rodzaj mocowania idealnie nadaje się do pchania i ciągnięcia zatrzask do drzwi przesuwnych Aby zablokować i odblokować drzwi. Decydując się na tę metodę, należy upewnić się, że urządzenie montażowe wytrzyma obciążenie przyłożone przez siłownik.
Zastosowania mikro i mini siłowników
Wszechstronność mikro- i mini siłowników kompaktowych, ich wydajne działanie, trwała konstrukcja, możliwości personalizacji i wysokie parametry techniczne otwierają przed nami nieskończone możliwości. Oto kilka przykładowych zastosowań i branż, w których są one wykorzystywane:
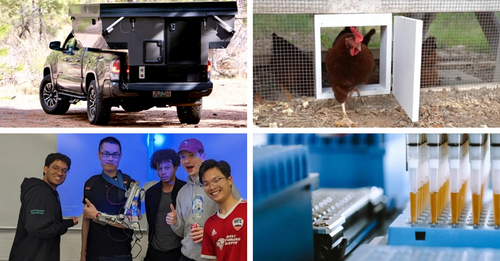
- Automatyka domowa:Dodatkowa wygoda i bezpieczeństwo wynikające z posiadania zamki do drzwi zabezpieczających, pergole dachowe z żaluzjami sterowane silnikiem, drzwi automatyczne, I projekty ukrytych wejść To tylko kilka obszarów w domu, w których można znaleźć zalety siłowników mikro i mini kompaktowych. Ich oszczędność miejsca, niskie wymagania konserwacyjne i prosta obsługa sprawiają, że są one popularne zarówno w zastosowaniach komercyjnych, jak i wśród majsterkowiczów.
- Projekty niestandardowe/DIYW wielu przypadkach, prototypowanie nowy produkt lub tworzenie wersje na małą skalę to kluczowy etap w procesie określania potencjalnych wyzwań, które mogą wymagać rozwiązania przed przystąpieniem do finalizacji projektu. Mikro- i minisiłowniki, dzięki swojej kompaktowej obudowie i wszechstronnym parametrom, pomagają w sterowaniu ruchem, demonstrując słuszność koncepcji jako sposób symulacji pełnowymiarowego projektu.
- Branże medyczne:W dziedzina medycyny, precyzja Sterowanie mikrosiłownikami ma kluczowe znaczenie w przypadku urządzeń przeznaczonych do obsługi przepływu płynów, napędzania robotów chirurgicznych lub pozycjonowania sprzętu medycznego. Regulowane łóżka, krzesła, sprzęt rehabilitacyjny i sprzęt do obrazowania mogą być wyposażone w minisiłowniki, które zapewniają cichy i płynny ruch. środowiska szpitalne.
- Przemysł motoryzacyjny:Przypadki użycia obejmują otwieranie schowki, wychowywanie obozowiczów, uchylanie lusterek, regulację okien i automatyzację przebudowy dachu. Połączenie zalet mikro- i minisiłowników pomaga poprawić komfort jazdy i użytkowania pojazdu, nie zajmując przy tym dużo miejsca dzięki kompaktowej konstrukcji.
- Branża rozrywkowa:Parki rozrywki i kostiumy na Halloween wykorzystują animatronika, roboty filmoweoraz rekwizyty z efektami specjalnymi, które urzekają publiczność realistycznym ruchem. Jest to możliwe dzięki szerokiej gamie konfiguracji dostępnych mikro- i minisiłowników, które radzą sobie z ograniczeniami przestrzennymi, wymaganiami dotyczącymi siły nacisku i warunkami zewnętrznymi, a jednocześnie są energooszczędne.
Przyszłość mikro i mini siłowników liniowych
Choć mikro- i mini siłowniki liniowe mogą nie być głównym tematem w świecie technologii, odgrywają one kluczową rolę w przesuwaniu granic możliwości. Wraz z postępem technologii, popyt na mniejsze i bardziej wydajne komponenty będzie nadal rósł.
Niezależnie od tego, czy projektujesz kolejny rewolucyjny gadżet, czy opracowujesz najnowocześniejszy sprzęt medyczny, mikro- i minisiłowniki mają przed sobą obiecującą przyszłość i mogą okazać się kompaktowymi rozwiązaniami, o których istnieniu nie wiedziałeś.
Ulepszenia materiałowe
Materiały odegrają kluczową rolę w poprawie wydajności i trwałości siłowników. Rozwój zaawansowanych kompozytów pozwoli na produkcję lżejszych i bardziej wytrzymałych siłowników, które będą w stanie wytrzymać większe obciążenia i działać w bardziej ekstremalnych warunkach. Materiały te przyczynią się również do zmniejszenia całkowitego rozmiaru siłowników bez uszczerbku dla integralności strukturalnej i mocy wyjściowej.
Większa wydajność
Oczekuje się, że ogólna wydajność mini- i mikrosiłowników stanie się bardziej wyrafinowana, ze szczególnym naciskiem na zwiększenie stosunku siły do rozmiaru. Zostanie to osiągnięte poprzez integrację wysokosprawnych silników i zoptymalizowanych układów przekładni, co pozwoli na większą precyzję i kontrolę. Ponadto, miniaturyzacja komponentów umożliwi kompaktowe siłowniki wpasowywanie się w coraz mniejsze przestrzenie, poszerzając zakres ich zastosowań.
Poprawa dokładności
Oczekuje się, że dokładność sprzężenia zwrotnego położenia ulegnie znacznej poprawie dzięki zastosowaniu zaawansowanych technologii czujników. Zastosowanie enkoderów optycznych, czujników Halla i innych mechanizmów sprzężenia zwrotnego o wysokiej rozdzielczości, będących w fazie rozwoju, zapewni precyzyjną kontrolę nad ruchem siłowników. Będzie to miało kluczowe znaczenie w zastosowaniach, w których precyzyjne pozycjonowanie ma kluczowe znaczenie, takich jak roboty chirurgiczne czy precyzyjny sprzęt produkcyjny.
Podsumowanie
Mikro- i minisiłowniki to wszechstronne komponenty optymalizujące zastosowania w ograniczonej przestrzeni, pozwalające na maksymalne wykorzystanie ich potencjału dzięki swojej trwałości, wydajności i precyzji. Dzięki zrozumieniu różnych typów mikro- i minisiłowników, ich specyfikacji oraz procesu doboru odpowiednich modeli, użytkownicy mogą zapewnić optymalne działanie i osiągnąć rezultaty odpowiadające potrzebom ich aplikacji.
Mamy nadzieję, że ten artykuł był dla Ciebie równie pouczający i interesujący, jak dla nas, zwłaszcza jeśli szukasz wskazówek dotyczących wyboru odpowiednich mikro- i mini siłowników liniowych do swojego zastosowania. Jeśli masz jakiekolwiek pytania dotyczące naszych produktów lub masz problem z wyborem odpowiedniego siłownika liniowego, skontaktuj się z nami! Jesteśmy ekspertami w swojej dziedzinie i chętnie pomożemy Ci w każdej sprawie!
Miniaturowe siłowniki mają większe rozmiary od mikrosiłowników, ale mimo to charakteryzują się kompaktową konstrukcją, stanowiąc mniej więcej połowę lub jedną trzecią objętości standardowych siłowników.
Nasze mikrosiłowniki są dostępne w wersjach o długości skoku od 0,5 do 12 cali, natomiast nasze miniaturowe siłowniki mają długość skoku od 2 do 40 cali.
Wymagania napięciowe naszych siłowników różnią się w zależności od modelu, jednak większość naszych modeli ma opcjonalnie lub standardowo możliwość zasilania napięciem 12 VDC.
Stopień ochrony IP naszych siłowników różni się w zależności od modelu, jednak siłowniki mikro i mini mogą mieć stopień ochrony od IP54 do IP66.
Ruch synchroniczny wielu siłowników jest możliwy, gdy siłowniki mają wbudowane sprzężenie zwrotne położenia, takie jak czujniki Halla połączone ze zgodnymi skrzynkami sterującymi Halla, które zostały zaprogramowane tak, aby utrzymywać ich synchronizację.