
Effizienz, Langlebigkeit und Präzision in kompakter Bauform sind häufig geforderte Eigenschaften von elektrischen Linearantrieben für diverse Branchen und Anwendungen mit beengten Platzverhältnissen. Durch die Auswahl geeigneter Mikro- und Mini-Antriebe profitieren auch Anwendungen mit begrenztem Platzangebot von Vorteilen wie präziser Steuerung, einfacher Bedienung und optimierter Leistung.
Diese Seite widmet sich dem Verständnis der Grundlagen von Mikro- und Mini-Aktuatoren, den Vorteilen, die sie bieten, unserem Modellangebot, wichtigen Spezifikationen und der Auswahl des besten Aktuators für Ihre spezifischen Anwendungsanforderungen.
Was sind elektrische Mikro- und Mini-Linearantriebe?
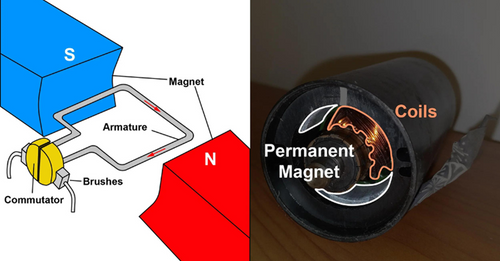
Aktuatoren Aktuatoren sind grundlegende Bauteile in verschiedenen mechanischen Systemen und spielen eine entscheidende Rolle bei der Umwandlung von Energie in Bewegung. Im Wesentlichen benötigt ein Aktor eine Energiequelle, typischerweise elektrisch, hydraulisch oder pneumatischund wandelt es in eine physische Bewegung um. Dies geschieht durch verschiedene Komponenten und Mechanismen, die von der Art des Aktuators abhängen.
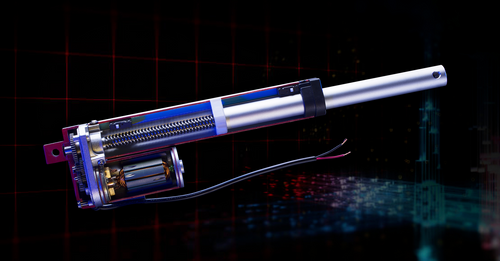
In elektrische LinearantriebeElektrischer Strom wird verwendet, um eine Drehbewegung in einem Gerät zu erzeugen. Elektromotor das mechanisch mit einem Getriebe verbunden ist und ein Gewindespindel um die Welle des Aktuators, die an einem befestigt ist, zu bewegen. GIPFEL Bohrmutter für Linearbewegung. Kugelgewindetrieb Es gibt auch Varianten mit unterschiedlichen Vor- und Nachteilen, die für verschiedene Anwendungsbereiche geeignet sind.
Während herkömmliche Aktuatoren oft sperrig sind, sind elektrische Mikro- und Mini-Linearaktuatoren so konzipiert, dass sie dieselbe Aufgabe in deutlich kleinerem Maßstab erfüllen. Diese kompakten Geräte passen in beengte Platzverhältnisse und eignen sich perfekt für Anwendungen, bei denen Präzision und Feinfühligkeit entscheidend sind. Bei großem Hub sind Breite und Höhe die wichtigsten Merkmale, die die kompakten Abmessungen von Mikro- und Mini-Aktuatoren verdeutlichen.
Bei einem kurzen Hub von 2 Zoll sind Breite und Höhe der Mikroaktoren mehr als kompakt genug, damit das Gerät in die Handfläche passt. Mini-Aktuatoren größer sein als MikroaktorenMini-Aktuatoren zeichnen sich jedoch weiterhin durch eine kompakte Bauweise aus und haben etwa die Hälfte oder ein Drittel des Volumens von Standard-AktuatorenDie

Vorteile von elektrischen Mikro- und Mini-Linearantrieben

Elektrische Mikro- und Mini-Linearantriebe bieten eine Reihe von Vorteilen, die sie zu einem unverzichtbaren Bestandteil der modernen Gesellschaft machen. Ihre kompakte Größe ermöglicht die Integration in beengte Räume und bietet präzise Steuerung und Bewegung dort, wo größere Antriebe nicht passen.
Durch die Miniaturisierung werden die Vielseitigkeit und Anpassungsfähigkeit der Systeme, in die sie integriert sind, erhöht und ein energieeffizienter Betrieb mit kleineren Motoren ermöglicht.
- Kompakte Größe: Dank ihrer deutlich geringeren Breite und Tiefe ermöglichen sie eine Bauform, die den Anwendungsanforderungen bei strengen Platzbeschränkungen oder bei der Maximierung des verbleibenden verfügbaren Stauraums in Staufächern gerecht wird.
- Präzision: Entwickelt mit Optionen für Positionsrückmeldung Um Anwendungen zu bewältigen, die Genauigkeit erfordern, bieten sie eine präzise Steuerung der Bewegung und weisen eine geringere Fertigungstoleranz auf als größere Linearantriebe.
- Effizienz: Trotz ihrer geringen Größe sind sie energieeffizient mit niedrigem Stromverbrauch und eingebauten Endschaltern bzw. niedrigem Stromverbrauch im Leerlauf, wodurch sie sich ideal für tragbare Systeme und batteriebetriebene Geräte eignen.
- Vielseitigkeit: Dank der Optionen für verschiedene Kraftwerte, Geschwindigkeiten, Hublängen, Rückkopplungsarten, Spannungsbetriebsarten und anderer anpassbarer Spezifikationen sind Mikro- und Mini-Aktuatoren vielseitig einsetzbar und eignen sich für eine Vielzahl von Anwendungen, von medizinischen Geräten bis hin zu Unterhaltungselektronik.
Die Auswahl des richtigen Mikro- und Mini-Aktuators für Ihr Projekt
Bei der Auswahl des richtigen Mikro- oder Mini-Aktuators für Ihr Projekt spielen einige wichtige Faktoren eine Rolle:
- Lastanforderungen: Bezieht sich darauf, wie viel Kraft Ihre Anwendung benötigt. Dies beeinflusst die Wahl des Aktuatormodells.
- GeschwindigkeitJe nach Anwendung benötigen Sie möglicherweise einen schnellen oder langsamen Kompaktaktuator. Wählen Sie entsprechend Ihren Anwendungsanforderungen.
- HublängeDies gibt an, wie weit sich der Aktor bewegen muss. Achten Sie darauf, dass die Hublänge den Anforderungen Ihres Projekts hinsichtlich des Verfahrwegs entspricht.
- Anforderungen an die elektrische LeistungDie Spannungs- und Stromaufnahmeanforderungen der einzelnen Aktuatormodelle können variieren. Berücksichtigen Sie die Spannung und Optionen für die Stromversorgung verfügbar für Ihren Kompaktaktuator.
- UmweltbeständigkeitBerücksichtigen Sie Ihre Anwendung und die Umgebungsbedingungen, um festzustellen, ob Ihr Kompaktaktuator einem bestimmten Maß an Staub, Flüssigkeitseintritt und/oder Korrosion standhalten muss.
- PositionsrückmeldungErmitteln Sie, ob Ihre Anwendung ein gewisses Maß an Präzision bei der Bewegung/Vorschub erfordert oder ob eine einfache manuelle Vorwärts- und Rückwärtssteuerung ausreichend ist.
- Kompatibilität des Steuerungssystems: Steuerungssysteme auswählen Die Aktuatoren müssen mit den gewählten Kompaktaktoren kompatibel sein. Falls Sie bereits Steuerungssysteme verwenden, stellen Sie sicher, dass die gewählten Aktuatoren kompatibel sind.
Wir bieten außerdem ein Online-Quiz mit Fragen an, die Ihnen bei der Auswahl aus unserem Angebot an Mikro- und Mini-Aktuatoren helfen, das für Ihre Bedürfnisse am besten geeignete Modell zu finden.
Lastanforderungen
Es spielen ein paar Faktoren eine Rolle bei die richtige Kraft finden Die Bemessung erfolgt zur Bewältigung der Lastanforderungen einer Anwendung. Zu den Variablen gehören die Last, der Winkel, unter dem die Last wirkt, und die Abmessungen der Last. Die Lastanforderungen werden gemessen, indem die Kraft bestimmt wird, die direkt auf die Welle eines Aktuators gedrückt bzw. gezogen werden muss (Beispieleinheiten: lbs, kg, Newton).
Geschwindigkeit
Die Verfahrgeschwindigkeit hängt üblicherweise von den eingestellten Kraftstufen des Aktuators ab. Einige Modelle bieten mehrere Kraftstufen zur Auswahl bei der Online-Bestellung. Die internen Übersetzungsverhältnisse dieser verschiedenen Kraftstufen sind auf ein bestimmtes Drehmoment eingestellt, was sich ebenfalls auf die Verfahrgeschwindigkeit des Aktuators auswirkt. Die Geschwindigkeit eines Aktuators wird anhand der zurückgelegten Strecke pro Zeiteinheit gemessen (z. B. Zoll/Sekunde, mm/Sekunde).
Hublänge
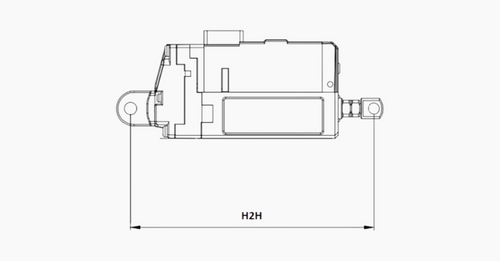
Die Loch-zu-Loch-Länge (H2H) eines Aktuators, gemessen von der Mitte der hinteren Befestigungsbohrung zur Mitte der vorderen Befestigungsbohrung, wird von der Hublänge beeinflusst. Dies liegt daran, dass eine größere Hublänge einen Aktuator mit einem längeren Gehäuse erfordert, um die darin enthaltene Welle aufzunehmen. Die Hublänge kann berechnet werden, indem die H2H-Länge im vollständig geschlossenen Zustand von der H2H-Länge im vollständig geöffneten Zustand des Aktuators subtrahiert wird (Beispieleinheiten: Zoll oder kurz „, mm).
Anforderungen an die elektrische Leistung
Eine Anwendung kann über eine bereits vorhandene Stromversorgung verfügen oder mit einem neu installierten Netzteil mit bestimmten Leistungsdaten und Anforderungen ausgestattet sein. Prüfen Sie die Spannungs- (VDC oder VAC) und Stromstärken (Ampere oder A) der Stromversorgung(en) und des/der Aktuators/Aktorin, um sicherzustellen, dass sie im geeigneten Bereich liegen. Als Faustregel gilt: Das Netzteil muss eine höhere Stromstärke liefern als der maximale Gesamtstrombedarf aller angeschlossenen Geräte.
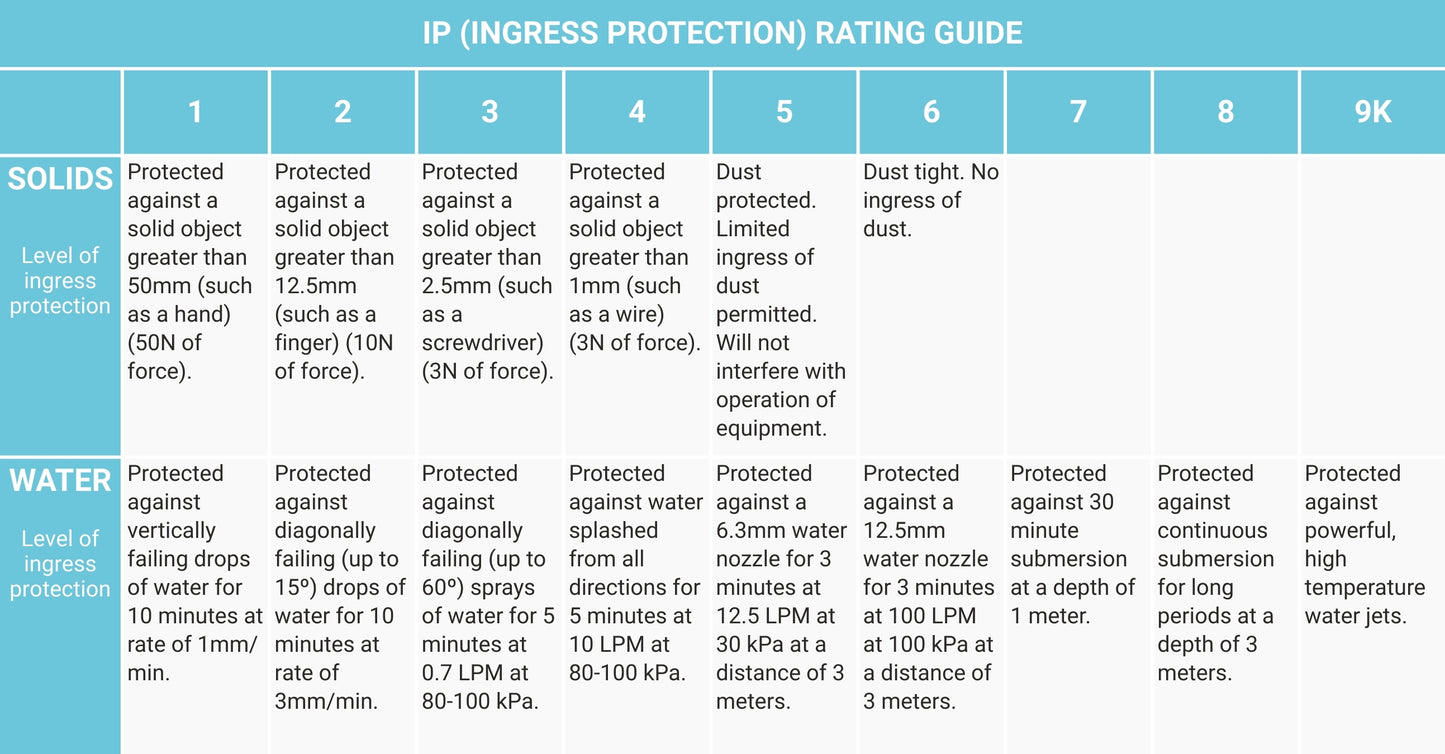
Umweltbeständigkeit
Schutzart (IP) Das Schutzartensystem verwendet ein zweistelliges System zur Definition der Schutzart aller Produkte. Die erste Ziffer steht für den Schutz gegen Feststoffe, die zweite gegen Flüssigkeiten. Der IP-Code wurde entwickelt, um Schutzarten zu standardisieren und Fehlinterpretationen bzw. falsche Darstellungen der Schutzwirkung eines Produkts zu vermeiden. Salzsprühnebelbeständigkeit ist entscheidend für den Schutz vor Korrosion, die durch gesalzene Straßen, Strände, Salzwasser usw. entstehen kann.
Positionsrückmeldung
Eingebaute Positionsrückmeldegeräte wie Encoder, Hall-Effekt-SensorenPotentiometer usw. werden zur Übertragung von Signalen verwendet, die von einer Steuerung ausgelesen werden, um die Position des Aktuatorhubs zu bestimmen. Dies ermöglicht Funktionen wie beispielsweise mehrere Aktuatoren, die sich gleichzeitig mit der gleichen Geschwindigkeit bewegen können. synchrone Bewegung, Speichervoreinstellungen und/oder Positionsanzeige.
Kompatibilität des Steuerungssystems

Check if your actuator has the matching communication protocols/positional feedback to the controllers you were considering. For example, the PA-12-T (TTL/PWM) and PA-12-R (RS-485) Micro Precision Servo Actuator provide precise position control with positional accuracy up to 100 um and require advanced communication protocols for such performance.
Another thing to consider is whether the type of motor your actuator has will be compatible with a control system. Continuously operating brushless motors such as those found in our custom ordered PA-14 actuators would require control boxes compatible with their operation such as the LC-241 control box.
To see which of our control boxes and actuators are compatible with each other, check out our control box comparison and compatibility charts.
Programmierbare Funktionen
Steuerboxen wie unsere FLTCON-Serie ermöglichen die Programmierung von Funktionen, Sicherheitsmerkmalen und anderen Benutzereinstellungen, auf die über das angeschlossene System zugegriffen werden kann. FernbedienungWenn mehrere Aktoren vom Typ Hall-Effekt an eine FLTCON-Steuereinheit angeschlossen sind, stellt die Steuereinheit sicher, dass Synchronisierung der Motoren Sie bewegen sich also gemeinsam mit der gleichen Geschwindigkeit.
Grundlegende manuelle Bedienelemente
Berücksichtigen Sie eventuelle Budgetbeschränkungen für das Projekt und wählen Sie ein Steuerungssystem, das das beste Preis-Leistungs-Verhältnis bietet und gleichzeitig Ihre Leistungsanforderungen erfüllt. Beispielsweise würden einfache Projekte im Innenbereich, die keine hohe Präzision erfordern, problemlos mit einem solchen System funktionieren. Verdrahtung eines einfachen Kippschalters ohne hohen Schutz gegen Eindringen von Fremdkörpern zur Steuerung eines 2-Draht-Mikrocontrollers oder Mini-Linearantrieb zu einem erschwinglichen Preis.

Technische Spezifikationen von Mikro- und Mini-Aktuatoren
Sobald die erforderlichen Spezifikationen und Funktionen für eine bestimmte Anwendung bestätigt sind, besteht der nächste Schritt darin, die verfügbaren Modelle zu durchsuchen, um dasjenige mit den am besten geeigneten Spezifikationen für Ihre Bedürfnisse zu ermitteln. Mikroaktuatoren weisen einige Spezifikationen auf, die sich teilweise mit denen von Miniaktuatoren überschneiden. Der auffälligste Unterschied zwischen den beiden Kategorien liegt jedoch in der Regel im Kraftbereich.
Stärkebewertungen
Mikroaktoren weisen dynamische Kräfte von 1,34 Pfund bis 39 Pfund und statische Kräfte von 0,67 Pfund bis 56 Pfund auf. Miniaktoren erreichen dynamische und statische Kräfte von 16 Pfund bis 450 Pfund.
| Kraftbewertung (Mikro) | PA-MC1 | PA-07 | PA-12-T | PA-12-R |
|---|---|---|---|---|
| Dynamisch | 8 - 39 Pfund | 5 Pfund | 1.34 - 2,69 Pfund | 3.82 - 22,48 Pfund |
| Statisch | 8 - 56 Pfund | 6,5 Pfund | 0.67 - 2,69 Pfund | 1.57 - 22,48 Pfund |
| Kraftbewertung (Mini) | PA-01 | PA-09 | PA-10 | PA-14 |
| Dynamisch | 16 - 225 Pfund | 330 Pfund | 450 Pfund | 35 - 150 Pfund |
| Statisch | 16 - 225 Pfund | 330 Pfund | 450 Pfund | 35 - 150 Pfund |
Hublängen
Mikroaktoren weisen einen Hub zwischen 0,5 und 12 Zoll auf, während Miniaktoren einen Hub zwischen 1 und 40 Zoll erreichen können. Neben der Länge sind Mikroaktoren auch hinsichtlich ihrer Abmessungen (Breite und Höhe) im Vergleich zu Miniaktoren kompakter.

Geschwindigkeiten
Die Geschwindigkeit von Mikroaktoren liegt bei Volllast zwischen 0,24"/s und 2,67"/s und im Leerlauf zwischen 0,30"/s und 3,15"/s. Mini-Aktoren erreichen Geschwindigkeiten zwischen 0,16"/s und 2,95"/s bei Volllast und zwischen 0,28"/s und 3,54"/s im Leerlauf.
| Geschwindigkeit (Mikro) | PA-MC1 | PA-07 | PA-12-T | PA-12-R |
|---|---|---|---|---|
| Keine Last | 0.31 - 1.85"/sec | 0.59"/sec | 0.47 - 1.42"/sec | 0.30 - 3.15"/sec |
| Volllast | 0.24 - 1.18"/sec | 0.55"/sec | 0.35 - 0.99"/sec | 0.25 - 2.67"/sec |
| Speed (Mini) | PA-01 | PA-09 | PA-10 | PA-14 |
| Keine Last | 0.28 - 3.54"/sec | 0.39"/sec | 0.28 - 0.56"/sec | 0.37 - 2.00"/sec |
| Volllast | 0.20 - 2.95"/sec | 0.27"/sec | 0.16 - 0.33"/sec | 0.28 - 1.38"/sec |
Positional Feedback
Positional feedback and communication protocol options available for micro actuators include TTL/PWM (PA-12-T) and RS-485 (PA-12-R), while mini actuators have options including hall effect sensors (PA-09 & PA-10) and built-in potentiometer feedback (PA-14).
Each individual stock actuator can only come with one type of positional feedback or communication protocol. The type of positional feedback chosen for an actuator will affect its compatibility with existing control systems. Custom orders for certain models may have options such as limit switch feedback.
Voltage Operation
The main standard voltage option for all our mini and micro actuators is 12 VDC operations for their brushed DC motors. Options for 24 VDC are available for all mini actuators while the micro actuators have 7.4 VDC as an option for the PA-12-T. Selecting a higher voltage option tends to result in a lower current draw for the same model.
Current Draw
Micro actuators have a current draw that ranges between 200 mA to 2.3 A at full load and 30 mA to 200 mA at no load. Mini actuators draw between 2 A to 6 A at full load and 500 mA to 1.5 A at no load.
Um unsere verschiedenen Modelle von Mikro- und Mini-Aktuatoren zu vergleichen, haben wir eine Referenz-Aktuator-Vergleichstabelle zusammengestellt.
Anleitung zur Montage von elektrischen Mikro- und Mini-Linearantrieben

The simplest way to ensure you have the correct mounting brackets for your linear actuator will be to source your mounting brackets from the original manufacturer of the actuator and verify they are compatible. For more information, we offer our mounting brackets compatibility chart and product descriptions under each of our actuators.
Other manufacturers may also have similar sources; however, you can also reach out for customer support as needed. For certain cases, users with unique requirements or specialized applications may have to consider custom-making their own brackets according to the measurements, design, and shape they need. Check out our actuator 3D drawings as a source for additional reference.
Equally important to sourcing compatible mounting brackets for your electric micro and mini actuators is selecting the mounting process with a method that is right for your application. Below are two common methods that are used to mount an electric linear actuator.
- Dual pivot mounting
- Stationary mounting
Dual Pivot Mounting

Die Doppelgelenkbefestigung ist eine Methode, bei der ein Aktor beidseitig mit einem frei drehbaren Befestigungspunkt fixiert wird. Dieser Befestigungspunkt besteht üblicherweise aus einem Befestigungsbolzen oder einer Gabel. Durch die Doppelgelenkbefestigung kann der Aktor beim Aus- und Einfahren beidseitig schwenken, wodurch eine Bewegung auf einem festgelegten Pfad mit zwei freien Drehpunkten realisiert werden kann.
Eine Beispielanwendung dieser Methode ist das automatische Öffnen und Schließen. HühnerstalltürenBeim Ausfahren des Stellantriebs ermöglichen die beiden Befestigungspunkte das Aufschwingen der Tür. Durch das Öffnen und Schließen der Tür ändert sich der Winkel, der Drehpunkt bietet jedoch ausreichend Platz für die Rotation der beiden Befestigungspunkte. Achten Sie bei dieser Methode darauf, dass der Stellantrieb ungehindert ausfahren kann.
Stationäre Montage
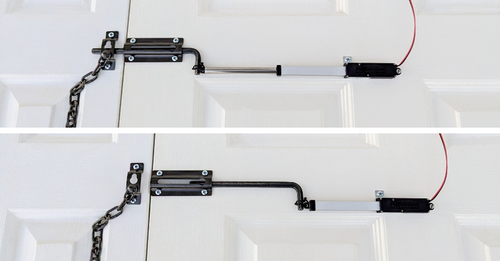
Bei der stationären Montageart kann die Welle geradlinig aus dem Gehäuse aus- und eingefahren werden, während der restliche Aktor fest montiert ist. Eine Montagehalterung für das Wellengehäuse kann verwendet werden, um die optimale Ausrichtung des Aktors auf der Montagefläche zu gewährleisten.
Diese Montageart wird häufig verwendet, um Aktionen wie das Schieben und Ziehen eines Anbauteils frontal auszuführen. Beispielsweise ist diese Montageform ideal zum Schieben und Ziehen eines Schiebetürriegel zum Ver- und Entriegeln einer Tür. Bei der Wahl dieser Methode ist darauf zu achten, dass die Montagevorrichtung die vom Aktor ausgeübte Last aufnehmen kann.
Anwendungen von Mikro- und Mini-Aktuatoren
Die Vielseitigkeit von Mikro- und Mini-Kompaktaktoren mit effizientem Betrieb, robuster Bauweise, individuellen Anpassungsmöglichkeiten und hoher Leistungsfähigkeit eröffnet unzählige Anwendungsmöglichkeiten. Hier einige Beispiele aus Branchen, in denen sie eingesetzt werden:
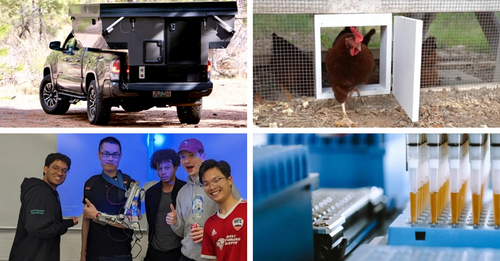
- HausautomationDer zusätzliche Komfort und die Sicherheit, die sich durch das Haben ergeben Sicherheitstürschlösser, motorisierte Lamellendachpergolen, Automatiktüren, Und Projekte mit versteckten Eingängen Dies sind nur einige Bereiche im Haushalt, die von Mikro- und Mini-Kompaktaktoren profitieren. Ihre Platzeffizienz, der geringe Wartungsaufwand und die einfache Bedienung machen sie sowohl im gewerblichen Bereich als auch bei Heimwerkern beliebt.
- Individuelle/DIY-ProjekteIn vielen Fällen Prototyping ein neues Produkt oder die Schaffung kleinmaßstäbliche Versionen Dies ist ein entscheidender Schritt, um potenzielle Herausforderungen zu identifizieren, die vor der endgültigen Projektumsetzung bewältigt werden müssen. Mikro- und Mini-Aktuatoren mit ihrer kompakten Bauweise und ihren vielseitigen Spezifikationen ermöglichen die Erzeugung von Bewegungen und dienen als Machbarkeitsnachweis, um ein Projekt in Originalgröße zu simulieren.
- Medizinische Industrie: Im medizinischer Bereich, Präzision Die Steuerung von Mikroaktoren ist entscheidend für Geräte, die Flüssigkeitsströme handhaben, Operationsroboter steuern oder medizinische Geräte positionieren. Verstellbare Betten, Stühle, Rehabilitationsgeräte und Bildgebungsgeräte können Mini-Aktoren für leise und gleichmäßige Bewegungen enthalten. KrankenhausumgebungenDie
- AutomobilindustrieAnwendungsfälle umfassen das Öffnen Staufächer, Camper aufziehenSpiegelneigung, Fensterverstellung und automatisierte Dachumbauten. Die Kombination der Vorteile von Mikro- und Mini-Aktuatoren trägt dazu bei, das Fahr- und Besitzerlebnis zu verbessern, ohne dank ihrer kompakten Bauform viel Platz zu beanspruchen.
- UnterhaltungsindustrieVergnügungsparks und Halloween-Kostüme nutzen Animatronik, Filmroboterund Spezialeffekt-Requisiten, die das Publikum durch lebensechte Bewegungen fesseln. Dies wird durch die große Vielfalt an Konfigurationsmöglichkeiten von Mikro- und Mini-Aktuatoren ermöglicht, die anspruchsvolle Platzverhältnisse, Kraftanforderungen und Außenumgebungen bewältigen und gleichzeitig energieeffizient sind.
Die Zukunft von elektrischen Mikro- und Mini-Linearantrieben
Obwohl elektrische Mikro- und Mini-Linearantriebe in der Tech-Welt nicht die größte Aufmerksamkeit erregen, spielen sie eine entscheidende Rolle bei der Erweiterung der Grenzen des Machbaren. Mit dem technologischen Fortschritt wird die Nachfrage nach kleineren und effizienteren Komponenten weiter steigen.
Ob Sie nun das nächste revolutionäre Gerät entwerfen oder hochmoderne medizinische Geräte entwickeln, Mikro- und Mini-Aktuatoren haben eine vielversprechende Zukunft vor sich und könnten die kompakten Lösungen sein, von denen Sie gar nicht wussten, dass Sie sie brauchen.
Materialverbesserungen
Werkstoffe spielen eine entscheidende Rolle bei der Verbesserung der Leistungsfähigkeit und Langlebigkeit von Aktuatoren. Die Entwicklung fortschrittlicher Verbundwerkstoffe ermöglicht leichtere und widerstandsfähigere Aktuatoren, die höheren Belastungen standhalten und in extremeren Umgebungen eingesetzt werden können. Diese Werkstoffe tragen außerdem dazu bei, die Gesamtgröße von Aktuatoren zu reduzieren, ohne die strukturelle Integrität und die Leistung zu beeinträchtigen.
Höhere Leistung
Die Gesamtleistung von Mini- und Mikroaktoren wird voraussichtlich weiter optimiert, wobei der Fokus auf der Verbesserung des Kraft-Größen-Verhältnisses liegt. Dies wird durch die Integration hocheffizienter Motoren und optimierter Getriebesysteme erreicht, die eine höhere Präzision und bessere Steuerung ermöglichen. Darüber hinaus ermöglicht die Miniaturisierung der Komponenten den Einbau kompakter Aktoren in immer kleinere Bauräume und erweitert somit deren Anwendungsbereich.
Genauigkeitsverbesserungen
Die Genauigkeit der Positionsrückmeldung dürfte sich durch den Einsatz fortschrittlicher Sensortechnologien deutlich verbessern. Optische Encoder, Hall-Effekt-Sensoren und andere hochauflösende Rückkopplungsmechanismen, die sich derzeit in der Entwicklung befinden, ermöglichen eine präzise Steuerung der Aktuatorbewegung. Dies ist entscheidend für Anwendungen, bei denen eine exakte Positionierung unerlässlich ist, wie beispielsweise bei chirurgischen Robotern oder Präzisionsfertigungsanlagen.
Zusammenfassung
Mikro- und Mini-Aktuatoren sind vielseitige Komponenten, die dank ihrer Langlebigkeit, Effizienz und Präzision das volle Potenzial von Anwendungen mit begrenztem Platzangebot ausschöpfen. Durch das Verständnis der verschiedenen Arten von Mikro- und Mini-Aktuatoren, ihrer Spezifikationen und des Auswahlprozesses geeigneter Modelle können Anwender einen optimalen Betrieb gewährleisten und die für ihre Anwendung erforderlichen Ergebnisse erzielen.
Wir hoffen, dass Sie diesen Artikel genauso informativ und interessant fanden wie wir, insbesondere wenn Sie nach einer Anleitung zur Auswahl geeigneter elektrischer Mikro- und Mini-Linearantriebe für Ihre Anwendung gesucht haben. Sollten Sie Fragen zu unseren Produkten haben oder Schwierigkeiten bei der Auswahl der passenden elektrischen Linearantriebe für Ihre Bedürfnisse haben, kontaktieren Sie uns gerne! Wir sind Experten auf unserem Gebiet und helfen Ihnen gerne bei allen Fragen weiter!
Mini-Aktuatoren sind größer als Mikro-Aktuatoren, weisen aber dennoch eine kompakte Bauweise auf und haben etwa die Hälfte oder ein Drittel des Volumens von Standard-Aktuatoren.
Unsere Mikroaktuatoren sind mit Hublängen von 0,5 bis 12 Zoll erhältlich, während unsere Miniaktuatoren Hublängen von 2 bis 40 Zoll aufweisen.
Die Spannungsanforderungen unserer Aktuatoren variieren von Modell zu Modell, jedoch bieten die meisten unserer Modelle Optionen für den Betrieb mit 12 V DC oder sind standardmäßig damit ausgestattet.
Die IP-Schutzarten unserer Aktuatoren variieren je nach Modell, Mikro- und Mini-Aktuatoren können jedoch Schutzarten von IP54 bis IP66 aufweisen.
Eine synchrone Bewegung mehrerer Aktuatoren ist möglich, wenn die Aktuatoren über eine eingebaute Positionsrückmeldung verfügen, wie z. B. Hall-Effekt-Sensoren, die mit kompatiblen Hall-Effekt-Steuerboxen gekoppelt sind, welche so programmiert wurden, dass sie synchronisiert bleiben.